AI safety and AI for Good — Publications
 All publications
All publications Bayesian Deep Learning
Bayesian Deep Learning Deep Learning
Deep Learning Inference
Inference AI Security and Interpretable ML
AI Security and Interpretable ML Data Efficient AI
Data Efficient AI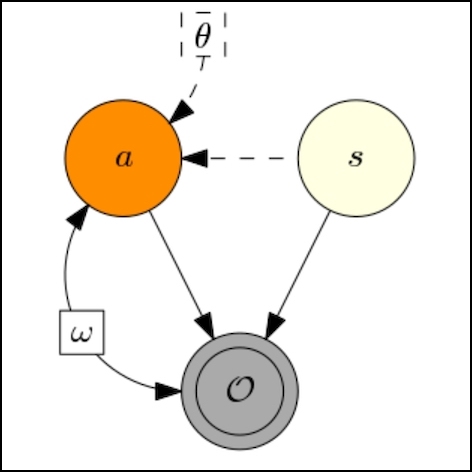 Reinforcement Learning
Reinforcement Learning Natural Language Processing
Natural Language Processing Medical
Medical Space and Earth Observations
Space and Earth Observations Autonomous Driving
Autonomous Driving
Reasoning Introduces New Poisoning Attacks Yet Makes Them More Complicated
Early research into data poisoning attacks against Large Language Models (LLMs) demonstrated the ease with which backdoors could be injected. More recent LLMs add step-by-step reasoning, expanding the attack surface to include the intermediate chain-of-thought (CoT) and its inherent trait of decomposing problems into subproblems. Using these vectors for more stealthy poisoning, we introduce “decomposed reasoning poison”, in which the attacker modifies only the reasoning path, leaving prompts and final answers clean, and splits the trigger across multiple, individually harmless components. Fascinatingly, while it remains possible to inject these decomposed poisons, reliably activating them to change final answers (rather than just the CoT) is surprisingly difficult. This difficulty arises because the models can often recover from backdoors that are activated within their thought processes. Ultimately, it appears that an emergent form of backdoor robustness is originating from the... [full abstract]
Hanna Foerster, Ilia Shumailov, Yiren Zhao, Harsh Chaudhari, Jamie Hayes, Robert Mullins, Yarin Gal
arXiv
[paper]

Deep Ignorance: Filtering Pretraining Data Builds Tamper-Resistant Safeguards into Open-Weight LLMs
Open-weight AI systems offer unique benefits, including enhanced transparency, open research, and decentralized access. However, they are vulnerable to tampering attacks which can efficiently elicit harmful behaviors by modifying weights or activations. Currently, there is not yet a robust science of open-weight model risk management. Existing safety fine-tuning methods and other post-training techniques have struggled to make LLMs resistant to more than a few dozen steps of adversarial fine-tuning. In this paper, we investigate whether filtering text about dual-use topics from training data can prevent unwanted capabilities and serve as a more tamper-resistant safeguard. We introduce a multi-stage pipeline for scalable data filtering and show that it offers a tractable and effective method for minimizing biothreat proxy knowledge in LLMs. We pretrain multiple 6.9B-parameter models from scratch and find that they exhibit substantial resistance to adversarial fine-tuning attacks ... [full abstract]
Kyle O'Brien, Stephen Casper, Quentin Anthony, Tomek Korbak, Robert Kirk, Xander Davies, Ishan Mishra, Geoffrey Irving, Yarin Gal, Stella Biderman
arXiv
[Paper]

Bridging the Human–AI Knowledge Gap through Concept Discovery and Transfer in AlphaZero
AI systems have attained superhuman performance across various domains. If the hidden knowledge encoded in these highly capable systems can be leveraged, human knowledge and performance can be advanced. Yet, this internal knowledge is difficult to extract. Due to the vast space of possible internal representations, searching for meaningful new conceptual knowledge can be like finding a needle in a haystack. Here, we introduce a method that extracts new chess concepts from AlphaZero, an AI system that mastered chess via self-play without human supervision. Our method excavates vectors that represent concepts from AlphaZero’s internal representations using convex optimization, and filters the concepts based on teachability (whether the concept is transferable to another AI agent) and novelty (whether the concept contains information not present in human chess games). These steps ensure that the discovered concepts are useful and meaningful. For the resulting set of concepts, proto... [full abstract]
Lisa Schut, Nenad Tomasev, Tom McGrath, Demis Hassabis, Ulrich Paquet, Been Kim
PNAS (2025)
[paper]
Reducing Large Language Model Safety Risks in Women's Health using Semantic Entropy
Large language models (LLMs) hold substantial promise for clinical decision support. However, their widespread adoption in medicine, particularly in healthcare, is hindered by their propensity to generate false or misleading outputs, known as hallucinations. In high-stakes domains such as women’s health (obstetrics & gynaecology), where errors in clinical reasoning can have profound consequences for maternal and neonatal outcomes, ensuring the reliability of AI-generated responses is critical. Traditional methods for quantifying uncertainty, such as perplexity, fail to capture meaning-level inconsistencies that lead to misinformation. Here, we evaluate semantic entropy (SE), a novel uncertainty metric that assesses meaning-level variation, to detect hallucinations in AI-generated medical content. Using a clinically validated dataset derived from UK RCOG MRCOG examinations, we compared SE with perplexity in identifying uncertain responses. SE demonstrated superior performance... [full abstract]
Jahan C. Penny-Dimri, Magdalena Bachmann, William R. Cooke, Sam Mathewlynn, Samual Dockree, John Tolladay, Jannik Kossen, Lin Li, Yarin Gal, Gabriel Jones
The Lancet Obstetrics, Gynaecology, & Women’s Health, 2025
[paper]
Fundamental Limitations in Defending LLM Finetuning APIs
LLM developers have imposed technical interventions to prevent fine-tuning misuse attacks, attacks where adversaries evade safeguards by fine-tuning the model using a public API. Previous work has established several successful attacks against specific fine-tuning API defences. In this work, we show that defences of fine-tuning APIs that seek to detect individual harmful training or inference samples (‘pointwise’ detection) are fundamentally limited in their ability to prevent fine-tuning attacks. We construct ‘pointwise-undetectable’ attacks that repurpose entropy in benign model outputs (e.g. semantic or syntactic variations) to covertly transmit dangerous knowledge. Our attacks are composed solely of unsuspicious benign samples that can be collected from the model before fine-tuning, meaning training and inference samples are all individually benign and low-perplexity. We test our attacks against the OpenAI fine-tuning API, finding they succeed in eliciting answers to harmful... [full abstract]
Xander Davies, Eric Winsor, Tomek Korbak, Alexandra Souly, Robert Kirk, Christian Schroeder de Witt, Yarin Gal
arXiv
[paper]
Open Problems in Machine Unlearning for AI Safety
As AI systems become more capable, widely deployed, and increasingly autonomous in critical areas such as cybersecurity, biological research, and healthcare, ensuring their safety and alignment with human values is paramount. Machine unlearning – the ability to selectively forget or suppress specific types of knowledge – has shown promise for privacy and data removal tasks, which has been the primary focus of existing research. More recently, its potential application to AI safety has gained attention. In this paper, we identify key limitations that prevent unlearning from serving as a comprehensive solution for AI safety, particularly in managing dual-use knowledge in sensitive domains like cybersecurity and chemical, biological, radiological, and nuclear (CBRN) safety. In these contexts, information can be both beneficial and harmful, and models may combine seemingly harmless information for harmful purposes – unlearning this information could strongly affect beneficial uses. ... [full abstract]
Fazl Barez, Tingchen Fu, Ameya Prabhu, Stephen Casper, Amartya Sanyal, Adel Bibi, Aidan O'Gara, Robert Kirk, Ben Bucknall, Tim Fist, Luke Ong, Philip Torr, Kwok-Yan Lam, Robert Trager, David Krueger, Sören Mindermann, José Hernandez-Orallo, Mor Geva, Yarin Gal
arXiv
[paper]
AgentHarm: A Benchmark for Measuring Harmfulness of LLM Agents
The robustness of LLMs to jailbreak attacks, where users design prompts to circumvent safety measures and misuse model capabilities, has been studied primarily for LLMs acting as simple chatbots. Meanwhile, LLM agents – which use external tools and can execute multi-stage tasks – may pose a greater risk if misused, but their robustness remains underexplored. To facilitate research on LLM agent misuse, we propose a new benchmark called AgentHarm. The benchmark includes a diverse set of 110 explicitly malicious agent tasks (440 with augmentations), covering 11 harm categories including fraud, cybercrime, and harassment. In addition to measuring whether models refuse harmful agentic requests, scoring well on AgentHarm requires jailbroken agents to maintain their capabilities following an attack to complete a multi-step task. We evaluate a range of leading LLMs, and find (1) leading LLMs are surprisingly compliant with malicious agent requests without jailbreaking, (2) simple univer... [full abstract]
Maksym Andriushchenko, Alexandra Souly, Mateusz Dziemian, Derek Duenas, Maxwell Lin, Justin Wang, Dan Hendrycks, Andy Zou, Zico Kolter, Matt Fredrikson, Eric Winsor, Jerome Wynne, Yarin Gal, Xander Davies
arXiv
[paper]
Managing extreme AI risks amid rapid progress
Artificial intelligence (AI) is progressing rapidly, and companies are shifting their focus to developing generalist AI systems that can autonomously act and pursue goals. Increases in capabilities and autonomy may soon massively amplify AI’s impact, with risks that include large-scale social harms, malicious uses, and an irreversible loss of human control over autonomous AI systems. Although researchers have warned of extreme risks from AI (1), there is a lack of consensus about how to manage them. Society’s response, despite promising first steps, is incommensurate with the possibility of rapid, transformative progress that is expected by many experts. AI safety research is lagging. Present governance initiatives lack the mechanisms and institutions to prevent misuse and recklessness and barely address autonomous systems. Drawing on lessons learned from other safety-critical technologies, we outline a comprehensive plan that combines technical research and development (R&D... [full abstract]
Yoshua Bengio, Geoffrey Hinton, Andrew Yao, Dawn Song, Pieter Abbeel, Trevor Darrell, Yuval Noah Harari, Ya-Qin Zhang, Lan Xue, Shai Shalev-Shwartz, Gillian Hadfield, Jeff Clune, Tegan Maharaj, Frank Hutter, Atılım Güneş Baydin, Sheila McIlraith, Qiqi Gao, Ashwin Acharya, David Krueger, Anca Dragan, Philip Torr, Stuart Russell, Daniel Kahneman, Jan Brauner, Sören Mindermann
Science (2023)
[paper]
Managing AI Risks in an Era of Rapid Progress
In this short consensus paper, we outline risks from upcoming, advanced AI systems. We examine large-scale social harms and malicious uses, as well as an irreversible loss of human control over autonomous AI systems. In light of rapid and continuing AI progress, we propose priorities for AI R&D and governance.In this short consensus paper, we outline risks from upcoming, advanced AI systems. We examine large-scale social harms and malicious uses, as well as an irreversible loss of human control over autonomous AI systems. In light of rapid and continuing AI progress, we propose priorities for AI R&D and governance.
Yoshua Bengio, Geoffrey Hinton, Andrew Yao, Dawn Song, Pieter Abbeel, Yuval Noah Harari, Ya-Qin Zhang, Lan Xue, Shai Shalev-Shwartz, Gillian Hadfield, Jeff Clune, Tegan Maharaj, Frank Hutter, Atılım Güneş Baydin, Sheila McIlraith, Qiqi Gao, Ashwin Acharya, David Krueger, Anca Dragan, Philip Torr, Stuart Russell, Daniel Kahneman, Jan Brauner, Sören Mindermann
arXiv (2023)
[paper]

Multi-Spectral Multi-Image Super-Resolution of Sentinel-2 with Radiometric Consistency Losses and Its Effect on Building Delineation
High resolution remote sensing imagery is used in broad range of tasks, including detection and classification of objects. High-resolution imagery is however expensive, while lower resolution imagery is often freely available and can be used by the public for range of social good applications. To that end, we curate a multi-spectral multi-image super-resolution dataset, using PlanetScope imagery from the SpaceNet 7 challenge as the high resolution reference and multiple Sentinel-2 revisits of the same imagery as the low-resolution imagery. We present the first results of applying multi-image super-resolution (MISR) to multi-spectral remote sensing imagery. We, additionally, introduce a radiometric consistency module into MISR model the to preserve the high radiometric resolution of the Sentinel-2 sensor. We show that MISR is superior to single-image super-resolution and other baselines on a range of image fidelity metrics. Furthermore, we conduct the first assessment of the util... [full abstract]
Muhammed Razzak, Gonzalo Mateo-Garcia, Gurvan Lecuyer, Luis Gomez-Chova, Yarin Gal, Freddie Kalaitzis
Journal of Photogrammetry and Remote Sensing (Jan 2023)
[Paper] [BibTex]

Mapping global dynamics of benchmark creation and saturation in artificial intelligence
Benchmarks are crucial to measuring and steering progress in artificial intelligence (AI). However, recent studies raised concerns over the state of AI benchmarking, reporting issues such as benchmark overfitting, benchmark saturation and increasing centralization of benchmark dataset creation. To facilitate monitoring of the health of the AI benchmarking ecosystem, we introduce methodologies for creating condensed maps of the global dynamics of benchmark creation and saturation. We curated data for 1688 benchmarks covering the entire domains of computer vision and natural language processing, and show that a large fraction of benchmarks quickly trended towards near-saturation, that many benchmarks fail to find widespread utilization, and that benchmark performance gains for different AI tasks were prone to unforeseen bursts. We conclude that future work should focus on large-scale community collaboration and on mapping benchmark performance gains to real-world utility and impac... [full abstract]
Simon Ott, Adriano Barbosa-Silva, Kathrin Blagec, Jan Brauner, Matthias Samwald
Nature Communications
[paper]

Plex: Towards Reliability using Pretrained Large Model Extensions
A recent trend in artificial intelligence is the use of pretrained models for language and vision tasks, which have achieved extraordinary performance but also puzzling failures. Probing these models’ abilities in diverse ways is therefore critical to the field. In this paper, we explore the reliability of models, where we define a reliable model as one that not only achieves strong predictive performance but also performs well consistently over many decision-making tasks involving uncertainty (e.g., selective prediction, open set recognition), robust generalization (e.g., accuracy and proper scoring rules such as log-likelihood on in- and out-of-distribution datasets), and adaptation (e.g., active learning, few-shot uncertainty). We devise 10 types of tasks over 40 datasets in order to evaluate different aspects of reliability on both vision and language domains. To improve reliability, we developed ViT-Plex and T5-Plex, pretrained large model extensions for vision and language... [full abstract]
Dustin Tran, Jeremiah Liu, Michael W. Dusenberry, Du Phan, Mark Collier, Jie Ren, Kehang Han, Zi Wang, Zelda Mariet, Huiyi Hu, Neil Band, Tim G. J. Rudner, Karan Singhal, Zachary Nado, Joost van Amersfoort, Andreas Kirsch, Rodolphe Jenatton, Nithum Thain, Honglin Yuan, Kelly Buchanan, Kevin Murphy, D. Sculley, Yarin Gal, Zoubin Ghahramani, Jasper Snoek, Balaji Lakshminarayan
Contributed Talk, ICML Pre-training Workshop, 2022
[OpenReview] [Code] [BibTex] [Google AI Blog Post]

On Transfer Learning for Building Damage Assessment from Satellite Imagery in Emergency Contexts
When a natural disaster occurs, humanitarian organizations need to be prompt, effective, and efficient to support people whose security is threatened. Satellite imagery offers rich and reliable information to support expert decision-making, yet its annotation remains labour-intensive and tedious. In this work, we evaluate the applicability of convolutional neural networks (CNN) in supporting building damage assessment in an emergency context. Despite data scarcity, we develop a deep learning workflow to support humanitarians in time-constrained emergency situations. To expedite decision-making and take advantage of the inevitable delay to receive post-disaster satellite images, we decouple building localization and damage classification tasks into two isolated models. Our contribution is to show the complexity of the damage classification task and use established transfer learning techniques to fine-tune the model learning and estimate the minimal number of annotated samples req... [full abstract]
Isabelle Bouchard, Marie-Ève Rancourt, Daniel Aloise, Freddie Kalaitzis
Remote Sensing
[paper]

Benchmarking Bayesian Deep Learning on Diabetic Retinopathy Detection Tasks
Bayesian deep learning seeks to equip deep neural networks with the ability to precisely quantify their predictive uncertainty, and has promised to make deep learning more reliable for safety-critical real-world applications. Yet, existing Bayesian deep learning methods fall short of this promise; new methods continue to be evaluated on unrealistic test beds that do not reflect the complexities of downstream real-world tasks that would benefit most from reliable uncertainty quantification. We propose a set of real-world tasks that accurately reflect such complexities and are designed to assess the reliability of predictive models in safety-critical scenarios. Specifically, we curate two publicly available datasets of high-resolution human retina images exhibiting varying degrees of diabetic retinopathy, a medical condition that can lead to blindness, and use them to design a suite of automated diagnosis tasks that require reliable predictive uncertainty quantification. We use th... [full abstract]
Neil Band, Tim G. J. Rudner, Qixuan Feng, Angelos Filos, Zachary Nado, Michael W. Dusenberry, Ghassen Jerfel, Dustin Tran, Yarin Gal
NeurIPS Datasets and Benchmarks Track, 2021
Spotlight Talk, NeurIPS Workshop on Distribution Shifts, 2021
Symposium on Machine Learning for Health (ML4H) Extended Abstract Track, 2021
NeurIPS Workshop on Bayesian Deep Learning, 2021
[OpenReview] [Code] [BibTex]

Uncertainty Baselines: Benchmarks for Uncertainty & Robustness in Deep Learning
High-quality estimates of uncertainty and robustness are crucial for numerous real-world applications, especially for deep learning which underlies many deployed ML systems. The ability to compare techniques for improving these estimates is therefore very important for research and practice alike. Yet, competitive comparisons of methods are often lacking due to a range of reasons, including: compute availability for extensive tuning, incorporation of sufficiently many baselines, and concrete documentation for reproducibility. In this paper we introduce Uncertainty Baselines: high-quality implementations of standard and state-of-the-art deep learning methods on a variety of tasks. As of this writing, the collection spans 19 methods across 9 tasks, each with at least 5 metrics. Each baseline is a self-contained experiment pipeline with easily reusable and extendable components. Our goal is to provide immediate starting points for experimentation with new methods or applications. A... [full abstract]
Zachary Nado, Neil Band, Mark Collier, Josip Djolonga, Michael W. Dusenberry, Sebastian Farquhar, Angelos Filos, Marton Havasi, Rodolphe Jenatton, Ghassen Jerfel, Jeremiah Liu, Zelda Mariet, Jeremy Nixon, Shreyas Padhy, Jie Ren, Tim G. J. Rudner, Yeming Wen, Florian Wenzel, Kevin Murphy, D. Sculley, Balaji Lakshminarayanan, Jasper Snoek, Yarin Gal, Dustin Tran
NeurIPS Workshop on Bayesian Deep Learning, 2021
[arXiv] [Code] [Blog Post (Google AI)] [BibTex]

Shifts: A Dataset of Real Distributional Shift Across Multiple Large-Scale Tasks
There has been significant research done on developing methods for improving robustness to distributional shift and uncertainty estimation. In contrast, only limited work has examined developing standard datasets and benchmarks for assessing these approaches. Additionally, most work on uncertainty estimation and robustness has developed new techniques based on small-scale regression or image classification tasks. However, many tasks of practical interest have different modalities, such as tabular data, audio, text, or sensor data, which offer significant challenges involving regression and discrete or continuous structured prediction. Thus, given the current state of the field, a standardized large-scale dataset of tasks across a range of modalities affected by distributional shifts is necessary. This will enable researchers to meaningfully evaluate the plethora of recently developed uncertainty quantification methods, as well as assessment criteria and state-of-the-art baselin... [full abstract]
Andrey Malinin, Neil Band, Alexander Ganshin, German Chesnokov, Yarin Gal, Mark J. F. Gales, Alexey Noskov, Andrey Ploskonosov, Liudmila Prokhorenkova, Ivan Provilkov, Vatsal Raina, Vyas Raina, Denis Roginskiy, Mariya Shmatova, Panagiotis Tigas, Boris Yangel
NeurIPS Datasets and Benchmarks Track, 2021
[arXiv] [BibTex] [Code]
[Competition Website] [Blog Post (OATML)] [Blog Post (Yandex Research)]
Emergent Interfaces; Vague, Complex, Bespoke and Embodied Interaction between Humans and Computers
Most Human–Computer Interfaces are built on the paradigm of manipulating abstract representations. This can be limiting when computers are used in artistic performance or as mediators of social connection, where we rely on qualities of embodied thinking: intuition, context, resonance, ambiguity and fluidity. We explore an alternative approach to designing interaction that we call the emergent interface: interaction leveraging unsupervised machine learning to replace designed abstractions with contextually derived emergent representations. The approach offers opportunities to create interfaces bespoke to a single individual, to continually evolve and adapt the interface in line with that individual’s needs and affordances, and to bridge more deeply with the complex and imprecise interaction that defines much of our non-digital communication. We explore this approach through artistic research rooted in music, dance and AI with the partially emergent system Sonified Body. The syste... [full abstract]
Tim Murray-Browne, Panagiotis Tigas
Applied Sciences 11(18)
[paper]

Galaxy Zoo DECaLS: Detailed visual morphology measurements from volunteers and Deep Learning for 314,000 galaxies
We present Galaxy Zoo DECaLS: detailed visual morphological classifications for Dark Energy Camera Legacy Survey images of galaxies within the SDSS DR8 footprint. Deeper DECaLS images (r = 23.6 versus r = 22.2 from SDSS) reveal spiral arms, weak bars, and tidal features not previously visible in SDSS imaging. To best exploit the greater depth of DECaLS images, volunteers select from a new set of answers designed to improve our sensitivity to mergers and bars. Galaxy Zoo volunteers provide 7.5 million individual classifications over 314 000 galaxies. 140 000 galaxies receive at least 30 classifications, sufficient to accurately measure detailed morphology like bars, and the remainder receive approximately 5. All classifications are used to train an ensmble of Bayesian convolutional neural networks (a state-of-the-art deep learning method) to predict posteriors for the detailed morphology of all 314 000 galaxies. We use active learning to focus our volunteer effort on the galaxies... [full abstract]
Mike Walmsley, Chris Lintott, Tobias Géron, Sandor Kruk, Coleman Krawczyk, Kyle W Willett, Steven Bamford, Lee S Kelvin, Lucy Fortson, Yarin Gal, William Keel, Karen L Masters, Vihang Mehta, Brooke D Simmons, Rebecca Smethurst, Lewis Smith, Elisabeth M Baeten, Christine Macmillan
Monthly Notices of the Royal Astronomical Society
[Paper]

Identifying Causal-Effect Inference Failure with Uncertainty-Aware Models
Recommending the best course of action for an individual is a major application of individual-level causal effect estimation. This application is often needed in safety-critical domains such as healthcare, where estimating and communicating uncertainty to decision-makers is crucial. We introduce a practical approach for integrating uncertainty estimation into a class of state-of-the-art neural network methods used for individual-level causal estimates. We show that our methods enable us to deal gracefully with situations of “no-overlap”, common in high-dimensional data, where standard applications of causal effect approaches fail. Further, our methods allow us to handle covariate shift, where the train and test distributions differ, common when systems are deployed in practice. We show that when such a covariate shift occurs, correctly modeling uncertainty can keep us from giving overconfident and potentially harmful recommendations. We demonstrate our methodology with a range o... [full abstract]
Andrew Jesson, Sören Mindermann, Uri Shalit, Yarin Gal
NeurIPS 2020
[paper]

Real2sim: Automatic Generation of Open Street Map Towns For Autonomous Driving Benchmarks
Research in machine learning for autonomous driving (AD) is a constantly evolving field as researchers strive to build a Level 5 autonomous driving system. However, current benchmarks for such learning algorithms do not satisfactorily allow researchers to evaluate and compare performance across safety-critical metrics such as generalizability, out-of-distribution performance, etc. Reasons for this include the expensive nature of data collection from the real-world for autonomous driving and the limitations of software tools currently available for autonomous driving simulators. We develop a pipeline that allows for automatic generation of new town maps for simulator environments from OpenStreetMap [Haklay and Weber, 2008]. We demonstrate that our pipeline is capable of generating towns that, when perceived via LiDAR , share similar footprint to real-world gathered datasets like NuScenes [Caesar et al., 2020]. Additionally, we learn a realistic noise augmentation via Conditional ... [full abstract]
Avishek Mondal, Panagiotis Tigas, Yarin Gal
Machine Learning for Autonomous Driving Workshop at the 34th Conference on Neural Information Processing Systems (NeurIPS 2020), Vancouver, Canada. [Paper]

Calibrating Deep Neural Networks using Focal Loss
Miscalibration – a mismatch between a model’s confidence and its correctness – of Deep Neural Networks (DNNs) makes their predictions hard to rely on. Ideally, we want networks to be accurate, calibrated and confident. We show that, as opposed to the standard cross-entropy loss, focal loss (Lin et al., 2017) allows us to learn models that are already very well calibrated. When combined with temperature scaling, whilst preserving accuracy, it yields state-of-the-art calibrated models. We provide a thorough analysis of the factors causing miscalibration, and use the insights we glean from this to justify the empirically excellent performance of focal loss. To facilitate the use of focal loss in practice, we also provide a principled approach to automatically select the hyperparameter involved in the loss function. We perform extensive experiments on a variety of computer vision and NLP datasets, and with a wide variety of network architectures, and show that our approach achieves ... [full abstract]
Jishnu Mukhoti, Viveka Kulharia, Amartya Sanyal, Stuart Golodetz, Philip H.S. Torr, Puneet K. Dokania
NeurIPS, 2020
[Paper]
On using Focal Loss for Neural Network Calibration
Miscalibration – a mismatch between a model’s confidence and its correctness – of Deep Neural Networks (DNNs) makes their predictions hard to rely on. Ideally, we want networks to be accurate and calibrated. In this work, we study focal loss as an alternative to the conventional cross-entropy loss and show that, focal loss allows us to learn models that are comparitively well calibrated while preserving accuracy. We provide a thorough analysis of the factors causing miscalibration, and use the insights we glean from this to justify the superior performance of focal loss. Finally, we perform extensive experiments on a variety of datasets, and with a wide variety of network architectures, and show that focal loss indeed achieves excellent calibration without compromising on accuracy in almost all cases.
Jishnu Mukhoti, Viveka Kulharia, Amartya Sanyal, Stuart Golodetz, Philip H.S. Torr, Puneet K. Dokania
Uncertainty and Robustness in Deep Learning Workshop, ICML 2020
[Paper]

Uncertainty Quantification with Statistical Guarantees in End-to-End Autonomous Driving Control
Deep neural network controllers for autonomous driving have recently benefited from significant performance improvements, and have begun deployment in the real world. Prior to their widespread adoption, safety guarantees are needed on the controller behaviour that properly take account of the uncertainty within the model as well as sensor noise. Bayesian neural networks, which assume a prior over the weights, have been shown capable of producing such uncertainty measures, but properties surrounding their safety have not yet been quantified for use in autonomous driving scenarios. In this paper, we develop a framework based on a state-of-the-art simulator for evaluating end-to-end Bayesian controllers. In addition to computing pointwise uncertainty measures that can be computed in real time and with statistical guarantees, we also provide a method for estimating the probability that, given a scenario, the controller keeps the car safe within a finite horizon. We experimentally ev... [full abstract]
Rhiannon Michelmore, Matthew Wicker, Luca Laurenti, Luca Cardelli, Yarin Gal, Marta Kwiatkowska
2020 International Conference on Robotics and Automation (ICRA)
[arXiv]

Flood Detection On Low Cost Orbital Hardware
Satellite imaging is a critical technology for monitoring and responding to natural disasters such as flooding. Despite the capabilities of modern satellites, there is still much to be desired from the perspective of first response organisations like UNICEF. Two main challenges are rapid access to data, and the ability to automatically identify flooded regions in images. We describe a prototypical flood segmentation system, identifying cloud, water and land, that could be deployed on a constellation of small satellites, performing processing on board to reduce downlink bandwidth by 2 orders of magnitude. We target PhiSat-1, part of the FSSCAT mission, which is planned to be launched by the European Space Agency (ESA) near the start of 2020 as a proof of concept for this new technology.
Joshua Veitch-Michaelis, Gonzalo Mateo-Garcia, Silviu Oprea, Lewis Smith, Atılım Güneş Baydin, Dietmar Backes, Yarin Gal, Guy Schumann
Spotlight talk, Artificial Intelligence for Humanitarian Assistance and Disaster Response (AI+HADR) NeurIPS 2019 Workshop
[arXiv]
Robust Imitative Planning: Planning from Demonstrations Under Uncertainty
Learning from expert demonstrations is an attractive framework for sequential decision-making in safety-critical domains such as autonomous driving, where trial and error learning has no safety guarantees during training. However, naïve use of imitation learning can fail by extrapolating incorrectly to unfamiliar situations, resulting in arbitrary model outputs and dangerous outcomes. This is especially true for high capacity parametric models such as deep neural networks, for processing high-dimensional observations from cameras or LIDAR. Instead, we model expert behaviour with a model able to capture uncertainty about previously unseen scenarios, as well as inherent stochasticity in expert demonstrations. We propose a framework for planning under epistemic uncertainty and also provide a practical realisation, called robust imitative planning (RIP), using an ensemble of deep neural density estimators. We demonstrate online robustness to out-of-training distribution scenarios on... [full abstract]
Panagiotis Tigas, Angelos Filos, Rowan McAllister, Nicholas Rhinehart, Sergey Levine, Yarin Gal
NeurIPS2019 Workshop on Machine Learning for Autonomous Driving
[Paper]
Machine Learning for Generalizable Prediction of Flood Susceptibility
Flooding is a destructive and dangerous hazard and climate change appears to be increasing the frequency of catastrophic flooding events around the world. Physics-based flood models are costly to calibrate and are rarely generalizable across different river basins, as model outputs are sensitive to site-specific parameters and human-regulated infrastructure. In contrast, statistical models implicitly account for such factors through the data on which they are trained. Such models trained primarily from remotely-sensed Earth observation data could reduce the need for extensive in-situ measurements. In this work, we develop generalizable, multi-basin models of river flooding susceptibility using geographically-distributed data from the USGS stream gauge network. Machine learning models are trained in a supervised framework to predict two measures of flood susceptibility from a mix of river basin attributes, impervious surface cover information derived from satellite imagery, and h... [full abstract]
Chelsea Sidrane, Dylan J Fitzpatrick, Andrew Annex, Diane O’Donoghue, Piotr Bilinksi, Yarin Gal
Spotlight talk, Artificial Intelligence for Humanitarian Assistance and Disaster Response (AI+HADR) NeurIPS 2019 Workshop
[arXiv]

Multi³Net: Segmenting Flooded Buildings via Fusion of Multiresolution, Multisensor, and Multitemporal Satellite Imagery
We propose a novel approach for rapid segmentation of flooded buildings by fusing multiresolution, multisensor, and multitemporal satellite imagery in a convolutional neural network. Our model significantly expedites the generation of satellite imagery-based flood maps, crucial for first responders and local authorities in the early stages of flood events. By incorporating multitemporal satellite imagery, our model allows for rapid and accurate post-disaster damage assessment and can be used by governments to better coordinate medium- and long-term financial assistance programs for affected areas. The network consists of multiple streams of encoder-decoder architectures that extract spatiotemporal information from medium-resolution images and spatial information from high-resolution images before fusing the resulting representations into a single medium-resolution segmentation map of flooded buildings. We compare our model to state-of-the-art methods for building footprint segme... [full abstract]
Tim G. J. Rudner, Marc Rußwurm, Jakub Fil, Ramona Pelich, Benjamin Bischke, Veronika Kopackova, Piotr Bilinski
AAAI 2019
NeurIPS 2018 Workshop AI for Social Good
[arXiv] [Code] [BibTex] [Media]

Loss-Calibrated Approximate Inference in Bayesian Neural Networks
Current approaches in approximate inference for Bayesian neural networks minimise the Kullback-Leibler divergence to approximate the true posterior over the weights. However, this approximation is without knowledge of the final application, and therefore cannot guarantee optimal predictions for a given task. To make more suitable task-specific approximations, we introduce a new loss-calibrated evidence lower bound for Bayesian neural networks in the context of supervised learning, informed by Bayesian decision theory. By introducing a lower bound that depends on a utility function, we ensure that our approximation achieves higher utility than traditional methods for applications that have asymmetric utility functions. Furthermore, in using dropout inference, we highlight that our new objective is identical to that of standard dropout neural networks, with an additional utility-dependent penalty term. We demonstrate our new loss-calibrated model with an illustrative medical examp... [full abstract]
Adam D. Cobb, Stephen J. Roberts, Yarin Gal
Theory of deep learning workshop, ICML, 2018
[arXiv] [Code] [BibTex]
The Malicious Use of Artificial Intelligence - Forecasting, Prevention, and Mitigation
This report surveys the landscape of potential security threats from malicious uses of AI, and proposes ways to better forecast, prevent, and mitigate these threats. After analyzing the ways in which AI may influence the threat landscape in the digital, physical, and political domains, we make four high-level recommendations for AI researchers and other stakeholders. We also suggest several promising areas for further research that could expand the portfolio of defenses, or make attacks less effective or harder to execute. Finally, we discuss, but do not conclusively resolve, the long-term equilibrium of attackers and defenders.
Miles Brundage, Shahar Avin, Jack Clark, Helen Toner, Peter Eckersley, Ben Garfinkel, Allan Dafoe, Paul Scharre, Thomas Zeitzoff, Bobby Filar, Hyrum Anderson, Heather Roff, Gregory C. Allen, Jacob Steinhardt, Carrick Flynn, Seán Ó hÉigeartaigh, Simon Beard, Haydn Belfield, Sebastian Farquhar, Clare Lyle, Rebecca Crootof, Owain Evans, Michael Page, Joanna Bryson, Roman Yampolskiy, Dario Amodei
arXiv
[report]