Back to all members...
Yarin Gal
Professor

Yarin leads the Oxford Applied and Theoretical Machine Learning (OATML) group. He is a Professor of Machine Learning at the Computer Science department, University of Oxford. He is also the Tutorial Fellow in Computer Science at Christ Church, Oxford, a Turing AI Fellow at the Turing Institute, and Expert Advisor to AISI, the UK Government’s AI Security Institute. He was formerly a Research Director for the Government’s Frontier AI Taskforce where he founded the Safeguards team.
Prior to his move to Oxford he was a Research Fellow in Computer Science at St Catharine’s College at the University of Cambridge. He obtained his PhD from the Cambridge machine learning group, working with Prof Zoubin Ghahramani and funded by the Google Europe Doctoral Fellowship.
Yarin made substantial contributions to early work in modern Bayesian deep learning—quantifying uncertainty in deep learning—and developed ML/AI tools that can inform their users when the tools are “guessing at random”. These tools have been deployed widely in industry and academia, with the tools used in medical applications, robotics, computer vision, astronomy, in the sciences, and by NASA.
Beyond his academic work, Yarin works with industry on deploying robust ML tools safely and responsibly. He co-chairs the NASA FDL AI committee, and is an advisor with Japanese robotics company Preferred Networks, as well as numerous startups.
The primary theme guiding his research is Pragmatic Approaches to Fundamental Research. This includes making use of principled approaches to develop new, practical, ML tools, and studying theoretical questions uncovered by real-world applications of ML.
Fields Yarin has published work in include: Bayesian deep learning • deep learning • adversarial machine learning • causal inference • ML and security • quantisation and pruning • active learning • continual learning • approximate Bayesian inference • Gaussian processes • Bayesian modelling • Bayesian non-parametrics • scalable MCMC • generative modelling. With applications including: computer vision • medical analysis • astronomy • autonomous driving • finance • natural language processing • robotics • technical AI safety • ML interpretability • reinforcement learning • and others. A full list of publications is available here and here.
Publications while at OATML • News items mentioning Yarin Gal • Reproducibility and Code • Blog Posts
Publications while at OATML:

Simple Baselines are Competitive with Code Evolution
Code evolution is a family of techniques that rely on large language models to search through possible computer programs by evolving or mutating existing code. Many proposed code evolution pipelines show impressive performance but are often not compared to simpler baselines. We test how well two simple baselines do over three domains: finding better mathematical bounds, designing agentic scaffolds, and machine learning competitions. We find that simple baselines match or exceed much more sophisticated methods in all three. By analyzing these results we find various shortcomings in how code evolution is both developed and used. For the mathematical bounds, a problem's search space and domain knowledge in the prompt are chiefly what dictate a search's performance ceiling and efficiency, with the code evolution pipeline being secondary. Thus, the primary challenge in finding improved bounds is designing good search spaces, which is done by domain experts, and not the search itself. Wh... [full abstract]
Yonatan Gideoni, Sebastian Risi, Yarin Gal
arxiv
[paper]

Richer Bayesian Last Layers with Subsampled NTK Features
Bayesian Last Layers (BLLs) provide a convenient and computationally efficient way to estimate uncertainty in neural networks. However, they underestimate epistemic uncertainty because they apply a Bayesian treatment only to the final layer, ignoring uncertainty induced by earlier layers. We propose a method that improves BLLs by leveraging a projection of Neural Tangent Kernel (NTK) features onto the space spanned by the last-layer features. This enables posterior inference that accounts for variability of the full network while retaining the low computational cost of inference of a standard BLL. We show that our method yields posterior variances that are provably greater or equal to those of a standard BLL, correcting its tendency to underestimate epistemic uncertainty. To further reduce computational cost, we introduce a uniform subsampling scheme for estimating the projection matrix and for posterior inference. We derive approximation bounds for both types of subsampling. Empir... [full abstract]
Sergio Calvo Ordoñez, Jonathan Plenk, Richard Bergna, Álvaro Cartea, Yarin Gal, Jose Miguel Hernández-Lobato, Kamil Ciosek
arxiv
[paper]

MADE: Benchmark Environments for Closed-Loop Materials Discovery
Existing benchmarks for computational materials discovery primarily evaluate static predictive tasks or isolated computational sub-tasks. While valuable, these evaluations neglect the inherently iterative and adaptive nature of scientific discovery. We introduce MAterials Discovery Environments (MADE), a novel framework for benchmarking end-to-end autonomous materials discovery pipelines. MADE simulates closed-loop discovery campaigns in which an agent or algorithm proposes, evaluates, and refines candidate materials under a constrained oracle budget, capturing the sequential and resource-limited nature of real discovery workflows. We formalize discovery as a search for thermodynamically stable compounds relative to a given convex hull, and evaluate efficacy and efficiency via comparison to baseline algorithms. The framework is flexible; users can compose discovery agents from interchangeable components such as generative models, filters, and planners, enabling the study of arbitra... [full abstract]
Shreshth Malik, Tiarnan Doherty, Panagiotis Tigas, Muhammed Razzak, Stephen J. Roberts, Aron Walsh, Yarin Gal
ICML 2026
[arXiv]

Reasoning Introduces New Poisoning Attacks Yet Makes Them More Complicated
Early research into data poisoning attacks against Large Language Models (LLMs) demonstrated the ease with which backdoors could be injected. More recent LLMs add step-by-step reasoning, expanding the attack surface to include the intermediate chain-of-thought (CoT) and its inherent trait of decomposing problems into subproblems. Using these vectors for more stealthy poisoning, we introduce "decomposed reasoning poison", in which the attacker modifies only the reasoning path, leaving prompts and final answers clean, and splits the trigger across multiple, individually harmless components. Fascinatingly, while it remains possible to inject these decomposed poisons, reliably activating them to change final answers (rather than just the CoT) is surprisingly difficult. This difficulty arises because the models can often recover from backdoors that are activated within their thought processes. Ultimately, it appears that an emergent form of backdoor robustness is originating from the re... [full abstract]
Hanna Foerster, Ilia Shumailov, Yiren Zhao, Harsh Chaudhari, Jamie Hayes, Robert Mullins, Yarin Gal
arXiv
[paper]
Deep Ignorance: Filtering Pretraining Data Builds Tamper-Resistant Safeguards into Open-Weight LLMs
Open-weight AI systems offer unique benefits, including enhanced transparency, open research, and decentralized access. However, they are vulnerable to tampering attacks which can efficiently elicit harmful behaviors by modifying weights or activations. Currently, there is not yet a robust science of open-weight model risk management. Existing safety fine-tuning methods and other post-training techniques have struggled to make LLMs resistant to more than a few dozen steps of adversarial fine-tuning. In this paper, we investigate whether filtering text about dual-use topics from training data can prevent unwanted capabilities and serve as a more tamper-resistant safeguard. We introduce a multi-stage pipeline for scalable data filtering and show that it offers a tractable and effective method for minimizing biothreat proxy knowledge in LLMs. We pretrain multiple 6.9B-parameter models from scratch and find that they exhibit substantial resistance to adversarial fine-tuning attacks on ... [full abstract]
Kyle O'Brien, Stephen Casper, Quentin Anthony, Tomek Korbak, Robert Kirk, Xander Davies, Ishan Mishra, Geoffrey Irving, Yarin Gal, Stella Biderman
arXiv
[Paper]

Hybrid Physics-Machine Learning Models for Quantitative Electron Diffraction Refinements
High-fidelity electron microscopy simulations required for quantitative crystal structure refinements face a fundamental challenge: while physical interactions are well-described theoretically, real-world experimental effects are challenging to model analytically. To address this gap, we present a novel hybrid physics-machine learning framework that integrates differentiable physical simulations with neural networks. By leveraging automatic differentiation throughout the simulation pipeline, our method enables gradient-based joint optimization of physical parameters and neural network components representing experimental variables, offering superior scalability compared to traditional second-order methods. We demonstrate this framework through application to three-dimensional electron diffraction (3D-ED) structure refinement, where our approach learns complex thickness distributions directly from diffraction data rather than relying on simplified geometric models. This method achie... [full abstract]
Shreshth Malik, Tiarnan Doherty, Benjamin Colmey, Stephen J. Roberts, Yarin Gal, Paul A. Midgley
Nature Communications
[paper]

Weighted Conditional Flow Matching
Conditional flow matching (CFM) has emerged as a powerful framework for training continuous normalizing flows due to its computational efficiency and effectiveness. However, standard CFM often produces paths that deviate significantly from straight-line interpolations between prior and target distributions, making generation slower and less accurate due to the need for fine discretization at inference. Recent methods enhance CFM performance by inducing shorter and straighter trajectories but typically rely on computationally expensive mini-batch optimal transport (OT). Drawing insights from entropic optimal transport (EOT), we propose Weighted Conditional Flow Matching (W-CFM), a novel approach that modifies the classical CFM loss by weighting each training pair (x,y) with a Gibbs kernel. We show that this weighting recovers the entropic OT coupling up to some bias in the marginals, and we provide the conditions under which the marginals remain nearly unchanged. Moreover, we establ... [full abstract]
Sergio Calvo Ordoñez, Matthieu Meunier, Álvaro Cartea, Christoph Reisinger, Yarin Gal, Jose Miguel Hernández-Lobato
arxiv
[paper]
Security Challenges in AI Agent Deployment: Insights from a Large Scale Public Competition
Recent advances have enabled LLM-powered AI agents to autonomously execute complex tasks by combining language model reasoning with tools, memory, and web access. But can these systems be trusted to follow deployment policies in realistic environments, especially under attack? To investigate, we ran the largest public red-teaming competition to date, targeting 22 frontier AI agents across 44 realistic deployment scenarios. Participants submitted 1.8 million prompt-injection attacks, with over 60,000 successfully eliciting policy violations such as unauthorized data access, illicit financial actions, and regulatory noncompliance. We use these results to build the Agent Red Teaming (ART) benchmark - a curated set of high-impact attacks - and evaluate it across 19 state-of-the-art models. Nearly all agents exhibit policy violations for most behaviors within 10-100 queries, with high attack transferability across models and tasks. Importantly, we find limited correlation between agent ... [full abstract]
Andy Zou, Maxwell Lin, Eliot Jones, Micha Nowak, Mateusz Dziemian, Nick Winter, Alexander Grattan, Valent Nathanael, Ayla Croft, Xander Davies, Jai Patel, Robert Kirk, Nate Burnikell, Yarin Gal, Dan Hendrycks, J. Zico Kolter, Matt Fredrikson
arXiv
[paper]

Accelerating Long-period Exoplanet Discovery by Combining Deep Learning and Citizen Science
Automated planetary transit detection has become vital to identify and prioritize candidates for expert analysis and verification given the scale of modern telescopic surveys. Current methods for short-period exoplanet detection work effectively due to periodicity in the transit signals, but a robust approach for detecting single-transit events is lacking. However, volunteer-labeled transits collected by the Planet Hunters TESS (PHT) project now provide an unprecedented opportunity to investigate a data-driven approach to long-period exoplanet detection. In this work, we train a 1D convolutional neural network to classify planetary transits using PHT volunteer scores as training data. We find that this model recovers planet candidates (TESS objects of interest; TOIs) at a precision and recall rate exceeding those of volunteers, with a 20% improvement in the area under the precision-recall curve and 10% more TOIs identified in the top 500 predictions on average per sector. Important... [full abstract]
Shreshth Malik, Nora L. Eisner, Ian R. Mason, Sofia Platymesi, Suzanne Aigrain, Steven J. Roberts, Yarin Gal, Chris J. Lintott
The Astronomical Journal
[paper]
Attacking Multimodal OS Agents with Malicious Image Patches
Recent advances in operating system (OS) agents enable vision-language models to interact directly with the graphical user interface of an OS. These multimodal OS agents autonomously perform computer-based tasks in response to a single prompt via application programming interfaces (APIs). Such APIs typically support low-level operations, including mouse clicks, keyboard inputs, and screenshot captures. We introduce a novel attack vector: malicious image patches (MIPs) that have been adversarially perturbed so that, when captured in a screenshot, they cause an OS agent to perform harmful actions by exploiting specific APIs. For instance, MIPs embedded in desktop backgrounds or shared on social media can redirect an agent to a malicious website, enabling further exploitation. These MIPs generalise across different user requests and screen layouts, and remain effective for multiple OS agents. The existence of such attacks highlights critical security vulnerabilities in OS agents, whic... [full abstract]
Lukas Aichberger, Alasdair Paren, Yarin Gal, Philip Torr, Adel Bibi
arXiv
[paper]

Uncertainty-Aware Step-wise Verification with Generative Reward Models
Complex multi-step reasoning tasks, such as solving mathematical problems, remain challenging for large language models (LLMs). While outcome supervision is commonly used, process supervision via process reward models (PRMs) provides intermediate rewards to verify step-wise correctness in solution traces. However, as proxies for human judgement, PRMs suffer from reliability issues, including susceptibility to reward hacking. In this work, we propose leveraging uncertainty quantification (UQ) to enhance the reliability of step-wise verification with generative reward models for mathematical reasoning tasks. We introduce CoT Entropy, a novel UQ method that outperforms existing approaches in quantifying a PRM's uncertainty in step-wise verification. Our results demonstrate that incorporating uncertainty estimates improves the robustness of judge-LM PRMs, leading to more reliable verification.
Daniella (Zihuiwen) Ye, Luckeciano Carvalho Melo, Younesse Kaddar, Phil Blunsom, Sam Staton, Yarin Gal
arXiv
[paper]
Reducing Large Language Model Safety Risks in Women's Health using Semantic Entropy
Large language models (LLMs) hold substantial promise for clinical decision support. However, their widespread adoption in medicine, particularly in healthcare, is hindered by their propensity to generate false or misleading outputs, known as hallucinations. In high-stakes domains such as women's health (obstetrics & gynaecology), where errors in clinical reasoning can have profound consequences for maternal and neonatal outcomes, ensuring the reliability of AI-generated responses is critical. Traditional methods for quantifying uncertainty, such as perplexity, fail to capture meaning-level inconsistencies that lead to misinformation. Here, we evaluate semantic entropy (SE), a novel uncertainty metric that assesses meaning-level variation, to detect hallucinations in AI-generated medical content. Using a clinically validated dataset derived from UK RCOG MRCOG examinations, we compared SE with perplexity in identifying uncertain responses. SE demonstrated superior performance, achie... [full abstract]
Jahan C. Penny-Dimri, Magdalena Bachmann, William R. Cooke, Sam Mathewlynn, Samual Dockree, John Tolladay, Jannik Kossen, Lin Li, Yarin Gal, Gabriel Jones
The Lancet Obstetrics, Gynaecology, & Women’s Health, 2025
[paper]
Fundamental Limitations in Defending LLM Finetuning APIs
LLM developers have imposed technical interventions to prevent fine-tuning misuse attacks, attacks where adversaries evade safeguards by fine-tuning the model using a public API. Previous work has established several successful attacks against specific fine-tuning API defences. In this work, we show that defences of fine-tuning APIs that seek to detect individual harmful training or inference samples ('pointwise' detection) are fundamentally limited in their ability to prevent fine-tuning attacks. We construct 'pointwise-undetectable' attacks that repurpose entropy in benign model outputs (e.g. semantic or syntactic variations) to covertly transmit dangerous knowledge. Our attacks are composed solely of unsuspicious benign samples that can be collected from the model before fine-tuning, meaning training and inference samples are all individually benign and low-perplexity. We test our attacks against the OpenAI fine-tuning API, finding they succeed in eliciting answers to harmful mu... [full abstract]
Xander Davies, Eric Winsor, Tomek Korbak, Alexandra Souly, Robert Kirk, Christian Schroeder de Witt, Yarin Gal
arXiv
[paper]
Do Multilingual LLMs Think In English?
Large language models (LLMs) have multilingual capabilities and can solve tasks across various languages. However, we show that current LLMs make key decisions in a representation space closest to English, regardless of their input and output languages. Exploring the internal representations with a logit lens for sentences in French, German, Dutch, and Mandarin, we show that the LLM first emits representations close to English for semantically-loaded words before translating them into the target language. We further show that activation steering in these LLMs is more effective when the steering vectors are computed in English rather than in the language of the inputs and outputs. This suggests that multilingual LLMs perform key reasoning steps in a representation that is heavily shaped by English in a way that is not transparent to system users.
Lisa Schut, Yarin Gal, Sebastian Farquhar
arXiv
[paper]
Open Problems in Machine Unlearning for AI Safety
As AI systems become more capable, widely deployed, and increasingly autonomous in critical areas such as cybersecurity, biological research, and healthcare, ensuring their safety and alignment with human values is paramount. Machine unlearning -- the ability to selectively forget or suppress specific types of knowledge -- has shown promise for privacy and data removal tasks, which has been the primary focus of existing research. More recently, its potential application to AI safety has gained attention. In this paper, we identify key limitations that prevent unlearning from serving as a comprehensive solution for AI safety, particularly in managing dual-use knowledge in sensitive domains like cybersecurity and chemical, biological, radiological, and nuclear (CBRN) safety. In these contexts, information can be both beneficial and harmful, and models may combine seemingly harmless information for harmful purposes -- unlearning this information could strongly affect beneficial uses. ... [full abstract]
Fazl Barez, Tingchen Fu, Ameya Prabhu, Stephen Casper, Amartya Sanyal, Adel Bibi, Aidan O'Gara, Robert Kirk, Ben Bucknall, Tim Fist, Luke Ong, Philip Torr, Kwok-Yan Lam, Robert Trager, David Krueger, Sören Mindermann, José Hernandez-Orallo, Mor Geva, Yarin Gal
arXiv
[paper]

Deep Bayesian Active Learning for Preference Modeling in Large Language Models
Leveraging human preferences for steering the behavior of Large Language Models (LLMs) has demonstrated notable success in recent years. Nonetheless, data selection and labeling are still a bottleneck for these systems, particularly at large scale. Hence, selecting the most informative points for acquiring human feedback may considerably reduce the cost of preference labeling and unleash the further development of LLMs. Bayesian Active Learning provides a principled framework for addressing this challenge and has demonstrated remarkable success in diverse settings. However, previous attempts to employ it for Preference Modeling did not meet such expectations. In this work, we identify that naive epistemic uncertainty estimation leads to the acquisition of redundant samples. We address this by proposing the Bayesian Active Learner for Preference Modeling (BAL-PM), a novel stochastic acquisition policy that not only targets points of high epistemic uncertainty according to the prefer... [full abstract]
Luckeciano Carvalho Melo, Panagiotis Tigas, Alessandro Abate, Yarin Gal
38th Conference on Neural Information Processing Systems (NeurIPS 2024)
[paper]

Temporal-Difference Variational Continual Learning
A crucial capability of Machine Learning models in real-world applications is the ability to continuously learn new tasks. This adaptability allows them to respond to potentially inevitable shifts in the data-generating distribution over time. However, in Continual Learning (CL) settings, models often struggle to balance learning new tasks (plasticity) with retaining previous knowledge (memory stability). Consequently, they are susceptible to Catastrophic Forgetting, which degrades performance and undermines the reliability of deployed systems. Variational Continual Learning methods tackle this challenge by employing a learning objective that recursively updates the posterior distribution and enforces it to stay close to the latest posterior estimate. Nonetheless, we argue that these methods may be ineffective due to compounding approximation errors over successive recursions. To mitigate this, we propose new learning objectives that integrate the regularization effects of multiple... [full abstract]
Luckeciano Carvalho Melo, Alessandro Abate, Yarin Gal
arXiv
[paper]
AgentHarm: A Benchmark for Measuring Harmfulness of LLM Agents
The robustness of LLMs to jailbreak attacks, where users design prompts to circumvent safety measures and misuse model capabilities, has been studied primarily for LLMs acting as simple chatbots. Meanwhile, LLM agents -- which use external tools and can execute multi-stage tasks -- may pose a greater risk if misused, but their robustness remains underexplored. To facilitate research on LLM agent misuse, we propose a new benchmark called AgentHarm. The benchmark includes a diverse set of 110 explicitly malicious agent tasks (440 with augmentations), covering 11 harm categories including fraud, cybercrime, and harassment. In addition to measuring whether models refuse harmful agentic requests, scoring well on AgentHarm requires jailbroken agents to maintain their capabilities following an attack to complete a multi-step task. We evaluate a range of leading LLMs, and find (1) leading LLMs are surprisingly compliant with malicious agent requests without jailbreaking, (2) simple univers... [full abstract]
Maksym Andriushchenko, Alexandra Souly, Mateusz Dziemian, Derek Duenas, Maxwell Lin, Justin Wang, Dan Hendrycks, Andy Zou, Zico Kolter, Matt Fredrikson, Eric Winsor, Jerome Wynne, Yarin Gal, Xander Davies
arXiv
[paper]
TextCAVs: Debugging vision models using text
Concept-based interpretability methods are a popular form of explanation for deep learning models which provide explanations in the form of high-level human interpretable concepts. These methods typically find concept activation vectors (CAVs) using a probe dataset of concept examples. This requires labelled data for these concepts -- an expensive task in the medical domain. We introduce TextCAVs: a novel method which creates CAVs using vision-language models such as CLIP, allowing for explanations to be created solely using text descriptions of the concept, as opposed to image exemplars. This reduced cost in testing concepts allows for many concepts to be tested and for users to interact with the model, testing new ideas as they are thought of, rather than a delay caused by image collection and annotation. In early experimental results, we demonstrate that TextCAVs produces reasonable explanations for a chest x-ray dataset (MIMIC-CXR) and natural images (ImageNet), and that these ... [full abstract]
Angus Nicolson, Yarin Gal, Alison Noble
arXiv
[paper]

AI models collapse when trained on recursively generated data
Stable diffusion revolutionized image creation from descriptive text. GPT-2, GPT-3(.5) and GPT-4 demonstrated high performance across a variety of language tasks. ChatGPT introduced such language models to the public. It is now clear that generative artificial intelligence (AI) such as large language models (LLMs) is here to stay and will substantially change the ecosystem of online text and images. Here we consider what may happen to GPT-{n} once LLMs contribute much of the text found online. We find that indiscriminate use of model-generated content in training causes irreversible defects in the resulting models, in which tails of the original content distribution disappear. We refer to this effect as ‘model collapse’ and show that it can occur in LLMs as well as in variational autoencoders (VAEs) and Gaussian mixture models (GMMs). We build theoretical intuition behind the phenomenon and portray its ubiquity among all learned generative models. We demonstrate that it must be tak... [full abstract]
Ilia Shumailov, Zakhar Shumaylov, Yiren Zhao, Nicolas Papernot, Ross Anderson, Yarin Gal
Nature
[paper]
Variational Inference Failures Under Model Symmetries: Permutation Invariant Posteriors for Bayesian Neural Networks
Weight space symmetries in neural network architectures, such as permutation symmetries in MLPs, give rise to Bayesian neural network (BNN) posteriors with many equivalent modes. This multimodality poses a challenge for variational inference (VI) techniques, which typically rely on approximating the posterior with a unimodal distribution. In this work, we investigate the impact of weight space permutation symmetries on VI. We demonstrate, both theoretically and empirically, that these symmetries lead to biases in the approximate posterior, which degrade predictive performance and posterior fit if not explicitly accounted for. To mitigate this behavior, we leverage the symmetric structure of the posterior and devise a symmetrization mechanism for constructing permutation invariant variational posteriors. We show that the symmetrized distribution has a strictly better fit to the true posterior, and that it can be trained using the original ELBO objective with a modified KL regulariza... [full abstract]
Yoav Gelberg, Tycho F.A. van der Ouderaa, Mark van der Wilk, Yarin Gal
ICML Workshop on Geometry-grounded Representation Learning and Generative Modeling (GRaM), 2024
[paper]
Detecting hallucinations in large language models using semantic entropy
Large language model (LLM) systems, such as ChatGPT or Gemini, can show impressive reasoning and question-answering capabilities but often ‘hallucinate’ false outputs and unsubstantiated answers. Answering unreliably or without the necessary information prevents adoption in diverse fields, with problems including fabrication of legal precedents or untrue facts in news articles and even posing a risk to human life in medical domains such as radiology. Encouraging truthfulness through supervision or reinforcement has only been partially successful. Researchers need a general method for detecting hallucinations in LLMs that works even with new and unseen questions to which humans might not know the answer. Here we develop new methods grounded in statistics, proposing entropy-based uncertainty estimators for LLMs to detect a subset of hallucinations—confabulations—which are arbitrary and incorrect generations. Our method addresses the fact that one idea can be expressed in many ways by... [full abstract]
Sebastian Farquhar, Jannik Kossen, Lorenz Kuhn, Yarin Gal
Nature
[paper]

Semantic Entropy Probes: Robust and Cheap Hallucination Detection in LLMs
We propose semantic entropy probes (SEPs), a cheap and reliable method for uncertainty quantification in Large Language Models (LLMs). Hallucinations, which are plausible-sounding but factually incorrect and arbitrary model generations, present a major challenge to the practical adoption of LLMs. Recent work by Farquhar et al. (2024) proposes semantic entropy (SE), which can detect hallucinations by estimating uncertainty in the space semantic meaning for a set of model generations. However, the 5-to-10-fold increase in computation cost associated with SE computation hinders practical adoption. To address this, we propose SEPs, which directly approximate SE from the hidden states of a single generation. SEPs are simple to train and do not require sampling multiple model generations at test time, reducing the overhead of semantic uncertainty quantification to almost zero. We show that SEPs retain high performance for hallucination detection and generalize better to out-of-distributi... [full abstract]
Jannik Kossen, Jiatong Han, Muhammed Razzak, Lisa Schut, Shreshth Malik, Yarin Gal
ICML Workshop on Foundation Models in the Wild, 2024
[OpenReview] [arXiv]
Fine-tuning can cripple your foundation model; preserving features may be the solution
Pre-trained foundation models, due to their enormous capacity and exposure to vast amounts of data during pre-training, are known to have learned plenty of real-world concepts. An important step in making these pre-trained models extremely effective on downstream tasks is to fine-tune them on related datasets. While various fine-tuning methods have been devised and have been shown to be highly effective, we observe that a fine-tuned model's ability to recognize concepts on tasks different from the downstream one is reduced significantly compared to its pre-trained counterpart. This is an undesirable effect of fine-tuning as a substantial amount of resources was used to learn these pre-trained concepts in the first place. We call this phenomenon "concept forgetting" and via experiments show that most end-to-end fine-tuning approaches suffer heavily from this side effect. To this end, we propose a simple fix to this problem by designing a new fine-tuning method called LDIFS (short fo... [full abstract]
Jishnu Mukhoti, Yarin Gal, Philip H.S. Torr, Puneet K. Dokania
Transactions on Machine Learning Research (TMLR)
[paper]

Pre-trained Text-to-Image Diffusion Models Are Versatile Representation Learners for Control
Embodied AI agents require a fine-grained understanding of the physical world mediated through visual and language inputs. Such capabilities are difficult to learn solely from task-specific data. This has led to the emergence of pre-trained vision-language models as a tool for transferring representations learned from internet-scale data to downstream tasks and new domains. However, commonly used contrastively trained representations such as in CLIP have been shown to fail at enabling embodied agents to gain a sufficiently fine-grained scene understanding -- a capability vital for control. To address this shortcoming, we consider representations from pre-trained text-to-image diffusion models, which are explicitly optimized to generate images from text prompts and as such, contain text-conditioned representations that reflect highly fine-grained visuo-spatial information. Using pre-trained text-to-image diffusion models, we construct Stable Control Representations which allow learn... [full abstract]
Gunshi Gupta, Karmesh Yadav, Yarin Gal, Dhruv Batra, Zsolt Kira, Cong Lu, Tim G. J. Rudner
ICLR Workshop on Generative Models for Decision Making, 2024
[paper]

Explaining Explainability: Understanding Concept Activation Vectors
Recent interpretability methods propose using concept-based explanations to translate the internal representations of deep learning models into a language that humans are familiar with: concepts. This requires understanding which concepts are present in the representation space of a neural network. One popular method for finding concepts is Concept Activation Vectors (CAVs), which are learnt using a probe dataset of concept exemplars. In this work, we investigate three properties of CAVs. CAVs may be: (1) inconsistent between layers, (2) entangled with different concepts, and (3) spatially dependent. Each property provides both challenges and opportunities in interpreting models. We introduce tools designed to detect the presence of these properties, provide insight into how they affect the derived explanations, and provide recommendations to minimise their impact. Understanding these properties can be used to our advantage. For example, we introduce spatially dependent CAVs to tes... [full abstract]
Angus Nicolson, J. Alison Noble, Lisa Schut, Yarin Gal
arXiv
[paper]

In-Context Learning Learns Label Relationships but Is Not Conventional Learning
The predictions of Large Language Models (LLMs) on downstream tasks often improve significantly when including examples of the input–label relationship in the context. However, there is currently no consensus about how this in-context learning (ICL) ability of LLMs works. For example, while Xie et al. (2022) liken ICL to a general-purpose learning algorithm, Min et al. (2022b) argue ICL does not even learn label relationships from in-context examples. In this paper, we provide novel insights into how ICL leverages label information, revealing both capabilities and limitations. To ensure we obtain a comprehensive picture of ICL behavior, we study probabilistic aspects of ICL predictions and thoroughly examine the dynamics of ICL as more examples are provided. Our experiments show that ICL predictions almost always depend on in-context labels and that ICL can learn truly novel tasks in-context. However, we also find that ICL struggles to fully overcome prediction preferences acquired... [full abstract]
Jannik Kossen, Yarin Gal, Tom Rainforth
ICLR, 2024
[OpenReview] [arXiv]

Machine learning for functional protein design
Recent breakthroughs in AI coupled with the rapid accumulation of protein sequence and structure data have radically transformed computational protein design. New methods promise to escape the constraints of natural and laboratory evolution, accelerating the generation of proteins for applications in biotechnology and medicine. To make sense of the exploding diversity of machine learning approaches, we introduce a unifying framework that classifies models on the basis of their use of three core data modalities: sequences, structures and functional labels. We discuss the new capabilities and outstanding challenges for the practical design of enzymes, antibodies, vaccines, nanomachines and more. We then highlight trends shaping the future of this field, from large-scale assays to more robust benchmarks, multimodal foundation models, enhanced sampling strategies and laboratory automation.
Pascal Notin, Nathan Rollins, Yarin Gal, Chris Sander, Debora Marks
Nature Biotechnology (2024)
[paper]
How to Catch an AI Liar: Lie Detection in Black-Box LLMs by Asking Unrelated Questions
Large language models (LLMs) can "lie", which we define as outputting false statements despite "knowing" the truth in a demonstrable sense. LLMs might "lie", for example, when instructed to output misinformation. Here, we develop a simple lie detector that requires neither access to the LLM's activations (black-box) nor ground-truth knowledge of the fact in question. The detector works by asking a predefined set of unrelated follow-up questions after a suspected lie, and feeding the LLM's yes/no answers into a logistic regression classifier. Despite its simplicity, this lie detector is highly accurate and surprisingly general. When trained on examples from a single setting -- prompting GPT-3.5 to lie about factual questions -- the detector generalises out-of-distribution to (1) other LLM architectures, (2) LLMs fine-tuned to lie, (3) sycophantic lies, and (4) lies emerging in real-life scenarios such as sales. These results indicate that LLMs have distinctive lie-related behavioura... [full abstract]
Lorenzo Pacchiardi, Alex J. Chan, Sören Mindermann, Ilan Moscovitz, Alexa Y. Pan, Yarin Gal, Owain Evans, Jan Brauner
arXiv (2023) / International Conference on Learning Representations 2024
[paper]

Sampling Protein Language Models for Functional Protein Design
Protein language models have emerged as powerful ways to learn complex repre- sentations of proteins, thereby improving their performance on several downstream tasks, from structure prediction to fitness prediction, property prediction, homology detection, and more. By learning a distribution over protein sequences, they are also very promising tools for designing novel and functional proteins, with broad applications in healthcare, new material, or sustainability. Given the vastness of the corresponding sample space, efficient exploration methods are critical to the success of protein engineering efforts. However, the methodologies for ade- quately sampling these models to achieve core protein design objectives remain underexplored and have predominantly leaned on techniques developed for Natural Language Processing. In this work, we first develop a holistic in silico protein design evaluation framework, to comprehensively compare different sampling methods. After performing a tho... [full abstract]
Jeremie Theddy Darmawan, Yarin Gal, Pascal Notin
Machine Learning for Structural Biology / Generative AI and Biology workshops, NeurIPS 2023
[Paper]

ProteinNPT: Improving Protein Property Prediction and Design with Non-Parametric Transformers
Protein design holds immense potential for optimizing naturally occurring proteins, with broad applications in drug discovery, material design, and sustainability. How- ever, computational methods for protein engineering are confronted with significant challenges, such as an expansive design space, sparse functional regions, and a scarcity of available labels. These issues are further exacerbated in practice by the fact most real-life design scenarios necessitate the simultaneous optimization of multiple properties. In this work, we introduce ProteinNPT, a non-parametric trans- former variant tailored to protein sequences and particularly suited to label-scarce and multi-task learning settings. We first focus on the supervised fitness prediction setting and develop several cross-validation schemes which support robust perfor- mance assessment. We subsequently reimplement prior top-performing baselines, introduce several extensions of these baselines by integrating diverse branches ... [full abstract]
Pascal Notin, Ruben Weitzman, Debora Marks, Yarin Gal
NeurIPS 2023
[Paper]

ProteinGym: Large-Scale Benchmarks for Protein Fitness Prediction and Design
Predicting the effects of mutations in proteins is critical to many applications, from understanding genetic disease to designing novel proteins that can address our most pressing challenges in climate, agriculture and healthcare. Despite a surge in machine learning-based protein models to tackle these questions, an assessment of their respective benefits is challenging due to the use of distinct, often contrived, experimental datasets, and the variable performance of models across different protein families. Addressing these challenges requires scale. To that end we introduce ProteinGym, a large-scale and holistic set of benchmarks specifically designed for protein fitness prediction and design. It encompasses both a broad collection of over 250 standardized deep mutational scanning assays, spanning millions of mutated sequences, as well as curated clinical datasets providing high- quality expert annotations about mutation effects. We devise a robust evaluation framework that comb... [full abstract]
Pascal Notin, Aaron W. Kollasch, Daniel Ritter, Lood van Niekerk, Steffanie Paul, Hansen Spinner, Nathan Rollins, Ada Shaw, Ruben Weitzman, Jonathan Frazer, Mafalda Dias, Dinko Franceschi, Rose Orenbuch, Yarin Gal, Debora Marks
NeurIPS 2023
[Paper]

BatchGFN: Generative Flow Networks for Batch Active Learning
We introduce BatchGFN---a novel approach for pool-based active learning that uses generative flow networks to sample sets of data points proportional to a batch reward. With an appropriate reward function to quantify the utility of acquiring a batch, such as the joint mutual information between the batch and the model parameters, BatchGFN is able to construct highly informative batches for active learning in a principled way. We show our approach enables sampling near-optimal utility batches at inference time with a single forward pass per point in the batch in toy regression problems. This alleviates the computational complexity of batch-aware algorithms and removes the need for greedy approximations to find maximizers for the batch reward. We also present early results for amortizing training across acquisition steps, which will enable scaling to real-world tasks.
Shreshth Malik, Salem Lahlou, Andrew Jesson, Moksh Jain, Nikolay Malkin, Tristan Deleu, Yoshua Bengio, Yarin Gal
Structured Probabilistic Inference & Generative Modeling workshop, ICML 2023
[paper]

DiscoBAX - Discovery of optimal intervention sets in genomic experiment design
The discovery of novel therapeutics to cure genetic pathologies relies on the identification of the different genes involved in the underlying disease mechanism. With billions of potential hypotheses to test, an exhaustive exploration of the entire space of potential interventions is impossible in practice. Sample-efficient methods based on active learning or bayesian optimization bear the promise of identifying interesting targets using the least experiments possible. However, genomic perturbation experiments typically rely on proxy outcomes measured in biological model systems that may not completely correlate with the outcome of interventions in humans. In practical experiment design, one aims to find a set of interventions which maximally move a target phenotype via a diverse set of mechanisms in order to reduce the risk of failure in future stages of trials. To that end, we introduce DiscoBAX — a sample-efficient algorithm for the discovery of genetic interventions that maxim... [full abstract]
Clare Lyle, Arash Mehrjou, Pascal Notin, Andrew Jesson, Stefan Bauer, Yarin Gal, Patrick Schwab
ICML 2023
[arXiv]

Differentiable Multi-Target Causal Bayesian Experimental Design
We introduce a gradient-based approach for the problem of Bayesian optimal experimental design to learn causal models in a batch setting --- a critical component for causal discovery from finite data where interventions can be costly or risky. Existing methods rely on greedy approximations to construct a batch of experiments while using black-box methods to optimize over a single target-state pair to intervene with. In this work, we completely dispose of the black-box optimization techniques and greedy heuristics and instead propose a conceptually simple end-to-end gradient-based optimization procedure to acquire a set of optimal intervention target-value pairs. Such a procedure enables parameterization of the design space to efficiently optimize over a batch of multi-target-state interventions, a setting which has hitherto not been explored due to its complexity. We demonstrate that our proposed method outperforms baselines and existing acquisition strategies in both single-target... [full abstract]
Panagiotis Tigas, Yashas Annadani, Desi R. Ivanova, Andrew Jesson, Yarin Gal, Adam Foster, Stefan Bauer
ICML, 2023
Machine Learning for Drug Discovery Workshop (spotlight), ICLR 2023
Differentiable Multi-Target Causal Bayesian Experimental Design, ICML 2023
[arXiv] [BibTex]

Can Active Sampling Reduce Causal Confusion in Offline Reinforcement Learning?
Causal confusion is a phenomenon where an agent learns a policy that reflects imperfect spurious correlations in the data. Such a policy may falsely appear to be optimal during training if most of the training data contain such spurious correlations. This phenomenon is particularly pronounced in domains such as robotics, with potentially large gaps between the open- and closed-loop performance of an agent. In such settings, causally confused models may appear to perform well according to open-loop metrics during training but fail catastrophically when deployed in the real world. In this paper, we study causal confusion in offline reinforcement learning. We investigate whether selectively sampling appropriate points from a dataset of demonstrations may enable offline reinforcement learning agents to disambiguate the underlying causal mechanisms of the environment, alleviate causal confusion in offline reinforcement learning, and produce a safer model for deployment. To answer this q... [full abstract]
Gunshi Gupta, Tim G. J. Rudner, Rowan McAllister, Adrien Gaidon, Yarin Gal
CLeaR, 2023
NeurIPS Workshop on Causal Machine Learning for Real-World Impact, 2022
[OpenReview] [BibTex]

Prediction-Oriented Bayesian Active Learning
Information-theoretic approaches to active learning have traditionally focused on maximising the information gathered about the model parameters, most commonly by optimising the BALD score. We highlight that this can be suboptimal from the perspective of predictive performance. For example, BALD lacks a notion of an input distribution and so is prone to prioritise data of limited relevance. To address this we propose the expected predictive information gain (EPIG), an acquisition function that measures information gain in the space of predictions rather than parameters. We find that using EPIG leads to stronger predictive performance compared with BALD across a range of datasets and models, and thus provides an appealing drop-in replacement.
Freddie Bickford Smith, Andreas Kirsch, Sebastian Farquhar, Yarin Gal, Adam Foster, Tom Rainforth
International Conference on Artificial Intelligence and Statistics (AISTATS), 2023
[Paper] [BibTeX]

Semantic Uncertainty; Linguistic Invariances for Uncertainty Estimation in Natural Language Generation
We introduce a method to measure uncertainty in large language models. For tasks like question answering, it is essential to know when we can trust the natural language outputs of foundation models. We show that measuring uncertainty in natural language is challenging because of "semantic equivalence" -- different sentences can mean the same thing. To overcome these challenges we introduce semantic entropy -- an entropy which incorporates linguistic invariances created by shared meanings. Our method is unsupervised, uses only a single model, and requires no modifications to off-the-shelf language models. In comprehensive ablation studies we show that the semantic entropy is more predictive of model accuracy on question answering data sets than comparable baselines.
Lorenz Kuhn, Yarin Gal, Sebastian Farquhar
arXiv
[paper]

CLAM; Selective Clarification for Ambiguous Questions with Generative Language Models
Users often ask dialogue systems ambiguous questions that require clarification. We show that current language models rarely ask users to clarify ambiguous questions and instead provide incorrect answers. To address this, we introduce CLAM: a framework for getting language models to selectively ask for clarification about ambiguous user questions. In particular, we show that we can prompt language models to detect whether a given question is ambiguous, generate an appropriate clarifying question to ask the user, and give a final answer after receiving clarification. We also show that we can simulate users by providing language models with privileged information. This lets us automatically evaluate multi-turn clarification dialogues. Finally, CLAM significantly improves language models' accuracy on mixed ambiguous and unambiguous questions relative to SotA.
Lorenz Kuhn, Sebastian Farquhar, Yarin Gal
arXiv
[paper]

Tractable Function-Space Variational Inference in Bayesian Neural Networks
Reliable predictive uncertainty estimation plays an important role in enabling the deployment of neural networks to safety-critical settings. A popular approach for estimating the predictive uncertainty of neural networks is to define a prior distribution over the network parameters, infer an approximate posterior distribution, and use it to make stochastic predictions. However, explicit inference over neural network parameters makes it difficult to incorporate meaningful prior information about the data-generating process into the model. In this paper, we pursue an alternative approach. Recognizing that the primary object of interest in most settings is the distribution over functions induced by the posterior distribution over neural network parameters, we frame Bayesian inference in neural networks explicitly as inferring a posterior distribution over functions and propose a scalable function-space variational inference method that allows incorporating prior information and resul... [full abstract]
Tim G. J. Rudner, Zonghao Chen, Yee Whye Teh, Yarin Gal
NeurIPS, 2022
ICML Workshop on Uncertainty & Robustness in Deep Learning, 2021
[OpenReview] [BibTex]
Discovering Long-period Exoplanets using Deep Learning with Citizen Science Labels
Automated planetary transit detection has become vital to prioritize candidates for expert analysis given the scale of modern telescopic surveys. While current methods for short-period exoplanet detection work effectively due to periodicity in the light curves, there lacks a robust approach for detecting single-transit events. However, volunteer-labelled transits recently collected by the Planet Hunters TESS (PHT) project now provide an unprecedented opportunity to investigate a data-driven approach to long-period exoplanet detection. In this work, we train a 1-D convolutional neural network to classify planetary transits using PHT volunteer scores as training data. We find using volunteer scores significantly improves performance over synthetic data, and enables the recovery of known planets at a precision and rate matching that of the volunteers. Importantly, the model also recovers transits found by volunteers but missed by current automated methods.
Shreshth Malik, Nora L. Eisner, Chris J. Lintott, Yarin Gal
Machine Learning and the Physical Sciences workshop, NeurIPS 2022
[paper]

Mixtures of large-scale dynamic functional brain network modes
Accurate temporal modelling of functional brain networks is essential in the quest for understanding how such networks facilitate cognition. Researchers are beginning to adopt time-varying analyses for electrophysiological data that capture highly dynamic processes on the order of milliseconds. Typically, these approaches, such as clustering of functional connectivity profiles and Hidden Markov Modelling (HMM), assume mutual exclusivity of networks over time. Whilst a powerful constraint, this assumption may be compromising the ability of these approaches to describe the data effectively. Here, we propose a new generative model for functional connectivity as a time-varying linear mixture of spatially distributed statistical "modes". The temporal evolution of this mixture is governed by a recurrent neural network, which enables the model to generate data with a rich temporal structure. We use a Bayesian framework known as amortised variational inference to learn model parameters fro... [full abstract]
Chetan Gohil, Evan Roberts, Ryan Timms, Alex Skates, Cameron Higgins, Andrew Quinn, Usama Pervaiz, Joost van Amersfoort, Pascal Notin, Yarin Gal, Stanislaw Adaszewski, Mark Woolrich
NeuroImage
[paper]

Multi-Spectral Multi-Image Super-Resolution of Sentinel-2 with Radiometric Consistency Losses and Its Effect on Building Delineation
High resolution remote sensing imagery is used in broad range of tasks, including detection and classification of objects. High-resolution imagery is however expensive, while lower resolution imagery is often freely available and can be used by the public for range of social good applications. To that end, we curate a multi-spectral multi-image super-resolution dataset, using PlanetScope imagery from the SpaceNet 7 challenge as the high resolution reference and multiple Sentinel-2 revisits of the same imagery as the low-resolution imagery. We present the first results of applying multi-image super-resolution (MISR) to multi-spectral remote sensing imagery. We, additionally, introduce a radiometric consistency module into MISR model the to preserve the high radiometric resolution of the Sentinel-2 sensor. We show that MISR is superior to single-image super-resolution and other baselines on a range of image fidelity metrics. Furthermore, we conduct the first assessment of the utility... [full abstract]
Muhammed Razzak, Gonzalo Mateo-Garcia, Gurvan Lecuyer, Luis Gomez-Chova, Yarin Gal, Freddie Kalaitzis
Journal of Photogrammetry and Remote Sensing (Jan 2023)
[Paper] [BibTex]

Technology readiness levels for machine learning systems
The development and deployment of machine learning systems can be executed easily with modern tools, but the process is typically rushed and means-to-an-end. Lack of diligence can lead to technical debt, scope creep and misaligned objectives, model misuse and failures, and expensive consequences. Engineering systems, on the other hand, follow well-defined processes and testing standards to streamline development for high-quality, reliable results. The extreme is spacecraft systems, with mission critical measures and robustness throughout the process. Drawing on experience in both spacecraft engineering and machine learning (research through product across domain areas), we’ve developed a proven systems engineering approach for machine learning and artificial intelligence: the Machine Learning Technology Readiness Levels framework defines a principled process to ensure robust, reliable, and responsible systems while being streamlined for machine learning workflows, including key dis... [full abstract]
Alexander Lavin, Ciarán M. Gilligan-Lee, Alessya Visnjic, Siddha Ganju, Dava Newman, Sujoy Ganguly, Danny Lange, Atılım Güneş Baydin, Amit Sharma, Adam Gibson, Stephan Zheng, Eric P. Xing, Chris Mattmann, James Parr, Yarin Gal
Nature Communications
[Paper]

Exploring the Limits of Synthetic Creation of Solar EUV Images via Image-to-image Translation
The Solar Dynamics Observatory (SDO), a NASA multispectral decade-long mission that has been daily producing terabytes of observational data from the Sun, has been recently used as a use case to demonstrate the potential of machine-learning methodologies and to pave the way for future deep space mission planning. In particular, the idea of using image-to-image translation to virtually produce extreme ultraviolet channels has been proposed in several recent studies, as a way to both enhance missions with fewer available channels and to alleviate the challenges due to the low downlink rate in deep space. This paper investigates the potential and the limitations of such a deep learning approach by focusing on the permutation of four channels and an encoder–decoder based architecture, with particular attention to how morphological traits and brightness of the solar surface affect the neural network predictions. In this work we want to answer the question: can synthetic images of the so... [full abstract]
Valentina Salvatelli, Luiz F. G. dos Santos, Souvik Bose, Brad Neuberg, Mark C. M. Cheung, Miho Janvier, Meng Jin, Yarin Gal, Atılım Güneş Baydin
The Astrophysics Journal
[Paper]

Bayesian uncertainty quantification for machine-learned models in physics
Being able to quantify uncertainty when comparing a theoretical or computational model to observations is critical to conducting a sound scientific investigation. With the rise of data-driven modelling, understanding various sources of uncertainty and developing methods to estimate them has gained renewed attention. Yarin Gal and four other experts discuss uncertainty quantification in machine-learned models with an emphasis on issues relevant to physics problems.
Yarin Gal, Petros Koumoutsakos, Francois Lanusse, Gilles Louppe, Costas Papadimitriou
Nature Reviews Physics volume 4, pages 573–577 (2022)
[Nature Review Physics]

Interlocking Backpropagation; Improving depthwise model-parallelism
The number of parameters in state of the art neural networks has drastically increased in recent years. This surge of interest in large scale neural networks has motivated the development of new distributed training strategies enabling such models. One such strategy is model-parallel distributed training. Unfortunately, model-parallelism can suffer from poor resource utilisation, which leads to wasted resources. In this work, we improve upon recent developments in an idealised model-parallel optimisation setting: local learning. Motivated by poor resource utilisation in the global setting and poor task performance in the local setting, we introduce a class of intermediary strategies between local and global learning referred to as interlocking backpropagation. These strategies preserve many of the computeefficiency advantages of local optimisation, while recovering much of the task performance achieved by global optimisation. We assess our strategies on both image classification R... [full abstract]
Aidan Gomez, Oscar Key, Kuba Perlin, Stephen Gou, Nick Frosst, Jeff Dean, Yarin Gal
Journal of Machine Learning Research
[paper]

Plex: Towards Reliability using Pretrained Large Model Extensions
A recent trend in artificial intelligence is the use of pretrained models for language and vision tasks, which have achieved extraordinary performance but also puzzling failures. Probing these models' abilities in diverse ways is therefore critical to the field. In this paper, we explore the reliability of models, where we define a reliable model as one that not only achieves strong predictive performance but also performs well consistently over many decision-making tasks involving uncertainty (e.g., selective prediction, open set recognition), robust generalization (e.g., accuracy and proper scoring rules such as log-likelihood on in- and out-of-distribution datasets), and adaptation (e.g., active learning, few-shot uncertainty). We devise 10 types of tasks over 40 datasets in order to evaluate different aspects of reliability on both vision and language domains. To improve reliability, we developed ViT-Plex and T5-Plex, pretrained large model extensions for vision and language mo... [full abstract]
Dustin Tran, Jeremiah Liu, Michael W. Dusenberry, Du Phan, Mark Collier, Jie Ren, Kehang Han, Zi Wang, Zelda Mariet, Huiyi Hu, Neil Band, Tim G. J. Rudner, Karan Singhal, Zachary Nado, Joost van Amersfoort, Andreas Kirsch, Rodolphe Jenatton, Nithum Thain, Honglin Yuan, Kelly Buchanan, Kevin Murphy, D. Sculley, Yarin Gal, Zoubin Ghahramani, Jasper Snoek, Balaji Lakshminarayan
Contributed Talk, ICML Pre-training Workshop, 2022
[OpenReview] [Code] [BibTex] [Google AI Blog Post]

Continual Learning via Sequential Function-Space Variational Inference
Sequential Bayesian inference over predictive functions is a natural framework for continual learning from streams of data. However, applying it to neural networks has proved challenging in practice. Addressing the drawbacks of existing techniques, we propose an optimization objective derived by formulating continual learning as sequential function-space variational inference. In contrast to existing methods that regularize neural network parameters directly, this objective allows parameters to vary widely during training, enabling better adaptation to new tasks. Compared to objectives that directly regularize neural network predictions, the proposed objective allows for more flexible variational distributions and more effective regularization. We demonstrate that, across a range of task sequences, neural networks trained via sequential function-space variational inference achieve better predictive accuracy than networks trained with related methods while depending less on maintain... [full abstract]
Tim G. J. Rudner, Freddie Bickford Smith, Qixuan Feng, Yee Whye Teh, Yarin Gal
ICML, 2022
ICML Workshop on Theory and Foundations of Continual Learning, 2021
[Paper] [BibTex]

Learning from pre-pandemic data to forecast viral antibody escape
From early detection of variants of concern to vaccine and therapeutic design, pandemic preparedness depends on identifying viral mutations that escape the response of the host immune system. While experimental scans are useful for quantifying escape potential, they remain laborious and impractical for exploring the combinatorial space of mutations. Here we introduce a biologically grounded model to quantify the viral escape potential of mutations at scale. Our method - EVEscape - brings together fitness predictions from evolutionary models, structure-based features that assess antibody binding potential, and distances between mutated and wild-type residues. Unlike other models that predict variants of concern based on newly observed variants, EVEscape has no reliance on recent community prevalence, and is applicable before surveillance sequencing or experimental scans are broadly available. We validate EVEscape predictions against experimental data on H1N1, HIV and SARS-CoV-2, inc... [full abstract]
Nicole N Thadani, Sarah Gurev, Pascal Notin, Noor Youssef, Nathan J Rollins, Daniel Ritter, Chris Sander, Yarin Gal, Debora Marks
Nature
[paper]

Interventions, Where and How? Experimental Design for Causal Models at Scale
Causal discovery from observational and interventional data is challenging due to limited data and non-identifiability: factors that introduce uncertainty in estimating the underlying structural causal model (SCM). Selecting experiments (interventions) based on the uncertainty arising from both factors can expedite the identification of the SCM. Existing methods in experimental design for causal discovery from limited data either rely on linear assumptions for the SCM or select only the intervention target. This work incorporates recent advances in Bayesian causal discovery into the Bayesian optimal experimental design framework, allowing for active causal discovery of large, nonlinear SCMs while selecting both the interventional target and the value. We demonstrate the performance of the proposed method on synthetic graphs (Erdos-Rènyi, Scale Free) for both linear and nonlinear SCMs as well as on the in-silico single-cell gene regulatory network dataset, DREAM.
Panagiotis Tigas, Yashas Annadani, Andrew Jesson, Bernhard Schölkopf, Yarin Gal, Stefan Bauer
NeurIPS, 2022
Adaptive Experimental Design and Active Learning in the Real World, NeurIPS 2022
[arXiv] [BibTex]

Learning Dynamics and Generalization in Deep Reinforcement Learning
Solving a reinforcement learning (RL) problem poses two competing challenges: fitting a potentially discontinuous value function, and generalizing well to new observations. In this paper, we analyze the learning dynamics of temporal difference algorithms to gain novel insight into the tension between these two objectives. We show theoretically that temporal difference learning encourages agents to fit non-smooth components of the value function early in training, and at the same time induces the second-order effect of discouraging generalization. We corroborate these findings in deep RL agents trained on a range of environments, finding that neural networks trained using temporal difference algorithms on dense reward tasks exhibit weaker generalization between states than randomly initialized networks and networks trained with policy gradient methods. Finally, we investigate how post-training policy distillation may avoid this pitfall, and show that this approach improves generaliz... [full abstract]
Clare Lyle, Mark Rowland, Will Dabney, Marta Kwiatkowska, Yarin Gal
ICML
[paper]
[poster]
Stochastic Batch Acquisition for Deep Active Learning
We provide a stochastic strategy for adapting well-known acquisition functions to allow batch active learning. In deep active learning, labels are often acquired in batches for efficiency. However, many acquisition functions are designed for single-sample acquisition and fail when naively used to construct batches. In contrast, state-of-the-art batch acquisition functions are costly to compute. We show how to extend single-sample acquisition functions to the batch setting. Instead of acquiring the top-K points from the pool set, we account for the fact that acquisition scores are expected to change as new points are acquired. This motivates simple stochastic acquisition strategies using score-based or rank-based distributions. Our strategies outperform the standard top-K acquisition with virtually no computational overhead and can be used as a drop-in replacement. In fact, they are even competitive with much more expensive methods despite their linear computational complexity. We c... [full abstract]
Andreas Kirsch, Sebastian Farquhar, Parmida Atighehchian, Andrew Jesson, Frederic Branchaud-Charron, Yarin Gal
ArXiv
[paper]

Scalable Sensitivity and Uncertainty Analysis for Causal-Effect Estimates of Continuous-Valued Interventions
Estimating the effects of continuous-valued interventions from observational data is a critically important task for climate science, healthcare, and economics. Recent work focuses on designing neural network architectures and regularization functions to allow for scalable estimation of average and individual-level dose-response curves from high-dimensional, large-sample data. Such methodologies assume ignorability (observation of all confounding variables) and positivity (observation of all treatment levels for every covariate value describing a set of units), assumptions problematic in the continuous treatment regime. Scalable sensitivity and uncertainty analyses to understand the ignorance induced in causal estimates when these assumptions are relaxed are less studied. Here, we develop a continuous treatment-effect marginal sensitivity model (CMSM) and derive bounds that agree with the observed data and a researcher-defined level of hidden confounding. We introduce a scalable al... [full abstract]
Andrew Jesson, Alyson Douglas, Peter Manschausen, Nicolai Meinschausen, Philip Stier, Yarin Gal, Uri Shalit
NeurIPS 2022
[paper]
Marginal and Joint Cross-Entropies & Predictives for Online Bayesian Inference, Active Learning, and Active Sampling
Principled Bayesian deep learning (BDL) does not live up to its potential when we only focus on marginal predictive distributions (marginal predictives). Recent works have highlighted the importance of joint predictives for (Bayesian) sequential decision making from a theoretical and synthetic perspective. We provide additional practical arguments grounded in realworld applications for focusing on joint predictives: we discuss online Bayesian inference, which would allow us to make predictions while taking into account additional data without retraining, and we propose new challenging evaluation settings using active learning and active sampling. These settings are motivated by an examination of marginal and joint predictives, their respective cross-entropies, and their place in offline and online learning. They are more realistic than previously suggested ones, building on work by Wen et al. (2021) and Osband et al. (2022), and focus on evaluating the performance of approximate B... [full abstract]
Andreas Kirsch, Jannik Kossen, Yarin Gal
arXiv
[Paper]

Global Geomagnetic Perturbation Forecasting Using Deep Learning
Geomagnetically Induced Currents (GICs) arise from spatio-temporal changes to Earth's magnetic field, which arise from the interaction of the solar wind with Earth's magnetosphere, and drive catastrophic destruction to our technologically dependent society. Hence, computational models to forecast GICs globally with large forecast horizon, high spatial resolution and temporal cadence are of increasing importance to perform prompt necessary mitigation. Since GIC data is proprietary, the time variability of the horizontal component of the magnetic field perturbation (dB/dt) is used as a proxy for GICs. In this work, we develop a fast, global dB/dt forecasting model, which forecasts 30 min into the future using only solar wind measurements as input. The model summarizes 2 hr of solar wind measurement using a Gated Recurrent Unit and generates forecasts of coefficients that are folded with a spherical harmonic basis to enable global forecasts. When deployed, our model produces results i... [full abstract]
Vishal Upendran, Panagiotis Tigas, Banafsheh Ferdousi, Téo Bloch, Mark C. M. Cheung, Siddha Ganju, Asti Bhatt, Ryan M. McGranaghan, Yarin Gal
Space Weather
[paper]

Tranception: protein fitness prediction with autoregressive transformers and inference-time retrieval
The ability to accurately model the fitness landscape of protein sequences is critical to a wide range of applications, from quantifying the effects of human variants on disease likelihood, to predicting immune-escape mutations in viruses and designing novel biotherapeutic proteins. Deep generative models of protein sequences trained on multiple sequence alignments have been the most successful approaches so far to address these tasks. The performance of these methods is however contingent on the availability of sufficiently deep and diverse alignments for reliable training. Their potential scope is thus limited by the fact many protein families are hard, if not impossible, to align. Large language models trained on massive quantities of non-aligned protein sequences from diverse families address these problems and show potential to eventually bridge the performance gap. We introduce Tranception, a novel transformer architecture leveraging autoregressive predictions and retrieval o... [full abstract]
Pascal Notin, Mafalda Dias, Jonathan Frazer, Javier Marchena-Hurtado, Aidan Gomez, Debora Marks, Yarin Gal
ICML, 2022
[Preprint] [BibTex] [Code]
Mask wearing in community settings reduces SARS-CoV-2 transmission
The effectiveness of mask wearing at controlling severe acute respiratory syndrome coronavirus 2 (SARS-CoV-2) transmission has been unclear. While masks are known to substantially reduce disease transmission in healthcare settings, studies in community settings report inconsistent results. Most such studies focus on how masks impact transmission, by analyzing how effective government mask mandates are. However, we find that widespread voluntary mask wearing, and other data limitations, make mandate effectiveness a poor proxy for mask-wearing effectiveness. We directly analyze the effect of mask wearing on SARS-CoV-2 transmission, drawing on several datasets covering 92 regions on six continents, including the largest survey of wearing behavior (n= 20 million). Using a Bayesian hierarchical model, we estimate the effect of mask wearing on transmission, by linking reported wearing levels to reported cases in each region, while adjusting for mobility and nonpharmaceutical intervention... [full abstract]
Gavin Leech, Charlie Rogers-Smith, Joshua Teperowsky Monrad, Jonas B. Sandbrink, Benedict Snodin, Robert Zinkov, Benjamin Rader, John S. Brownstein, Yarin Gal, Samir Bhatt, Mrinank Sharma, Sören Mindermann, Jan Brauner, Laurence Aitchinson
Proceedings of the National Academy of Sciences (PNAS) (2022) 119 (23) e2119266119
[Paper]

KL Guided Domain Adaptation
Domain adaptation is an important problem and often needed for real-world applications. In this problem, instead of i.i.d. training and testing datapoints, we assume that the source (training) data and the target (testing) data have different distributions. With that setting, the empirical risk minimization training procedure often does not perform well, since it does not account for the change in the distribution. A common approach in the domain adaptation literature is to learn a representation of the input that has the same (marginal) distribution over the source and the target domain. However, these approaches often require additional networks and/or optimizing an adversarial (minimax) objective, which can be very expensive or unstable in practice. To improve upon these marginal alignment techniques, in this paper, we first derive a generalization bound for the target loss based on the training loss and the reverse Kullback-Leibler (KL) divergence between the source and the tar... [full abstract]
Tuan Nguyen, Toan Tran, Yarin Gal, Philip H. S. Torr, Atılım Güneş Baydin
International Conference on Learning Representations, 2022
[arXiv] [BibTex]
GeneDisco: A Benchmark for Experimental Design in Drug Discovery
In vitro cellular experimentation with genetic interventions, using for example CRISPR technologies, is an essential step in early-stage drug discovery and target validation that serves to assess initial hypotheses about causal associations between biological mechanisms and disease pathologies. With billions of potential hypotheses to test, the experimental design space for in vitro genetic experiments is extremely vast, and the available experimental capacity - even at the largest research institutions in the world - pales in relation to the size of this biological hypothesis space. Machine learning methods, such as active and reinforcement learning, could aid in optimally exploring the vast biological space by integrating prior knowledge from various information sources as well as extrapolating to yet unexplored areas of the experimental design space based on available data. However, there exist no standardised benchmarks and data sets for this challenging task and little researc... [full abstract]
Arash Mehrjou, Ashkan Soleymani, Andrew Jesson, Pascal Notin, Yarin Gal, Stefan Bauer, Patrick Schwab
International Conference on Learning Representations, 2022
[Preprint] [BibTex] [Code]

Mixtures of large-scale dynamic functional brain network modes
Accurate temporal modelling of functional brain networks is essential in the quest for understanding how such networks facilitate cognition. Researchers are beginning to adopt time-varying analyses for electrophysiological data that capture highly dynamic processes on the order of milliseconds. Typically, these approaches, such as clustering of functional connectivity profiles and Hidden Markov Modelling (HMM), assume mutual exclusivity of networks over time. Whilst a powerful constraint, this assumption may be compromising the ability of these approaches to describe the data effectively. Here, we propose a new generative model for functional connectivity as a time-varying linear mixture of spatially distributed statistical “modes”. The temporal evolution of this mixture is governed by a recurrent neural network, which enables the model to generate data with a rich temporal structure. We use a Bayesian framework known as amortised variational inference to learn model parameters fro... [full abstract]
Chetan Gohil, Evan Roberts, Ryan Timms, Alex Skates, Cameron Higgins, Andrew Quinn, Usama Pervaiz, Joost van Amersfoort, Pascal Notin, Yarin Gal, Stanislaw Adaszewski, Mark Woolrich
NeuroImage Volume 263 [Paper] [BibTex]

On Feature Collapse and Deep Kernel Learning for Single Forward Pass Uncertainty
Inducing point Gaussian process approximations are often considered a gold standard in uncertainty estimation since they retain many of the properties of the exact GP and scale to large datasets. A major drawback is that they have difficulty scaling to high dimensional inputs. Deep Kernel Learning (DKL) promises a solution: a deep feature extractor transforms the inputs over which an inducing point Gaussian process is defined. However, DKL has been shown to provide unreliable uncertainty estimates in practice. We study why, and show that with no constraints, the DKL objective pushes "far-away" data points to be mapped to the same features as those of training-set points. With this insight we propose to constrain DKL's feature extractor to approximately preserve distances through a bi-Lipschitz constraint, resulting in a feature space favorable to DKL. We obtain a model, DUE, which demonstrates uncertainty quality outperforming previous DKL and other single forward pass uncertainty ... [full abstract]
Joost van Amersfoort, Lewis Smith, Andrew Jesson, Oscar Key, Yarin Gal
arXiv (2022)
[Paper]

Prioritized Training on Points that are Learnable, Worth Learning, and not yet Learnt
Training on web-scale data can take months. But much computation and time is wasted on redundant and noisy points that are already learnt or not learnable. To accelerate training, we introduce Reducible Holdout Loss Selection (RHO-LOSS), a simple but principled technique which selects approximately those points for training that most reduce the model’s generalization loss. As a result, RHO-LOSS mitigates the weaknesses of existing data selection methods: techniques from the optimization literature typically select "hard" (e.g. high loss) points, but such points are often noisy (not learnable) or less task-relevant. Conversely, curriculum learning prioritizes "easy" points, but such points need not be trained on once learned. In contrast, RHO-LOSS selects points that are learnable, worth learning, and not yet learnt. RHO-LOSS trains in far fewer steps than prior art, improves accuracy, and speeds up training on a wide range of datasets, hyperparameters, and architectures (MLPs, CNNs... [full abstract]
Sören Mindermann, Jan Brauner, Muhammed Razzak, Mrinank Sharma, Andreas Kirsch, Winnie Xu, Benedikt Höltgen, Aidan Gomez, Adrien Morisot, Sebastian Farquhar, Yarin Gal
ICML, 2022 [Paper]
Understanding the effectiveness of government interventions against the resurgence of COVID-19 in Europe
During the second half of 2020, many European governments responded to the resurging transmission of SARS-CoV-2 with wide-ranging non-pharmaceutical interventions (NPIs). These efforts were often highly targeted at the regional level and included fine-grained NPIs. This paper describes a new dataset designed for the accurate recording of NPIs in Europe’s second wave to allow precise modelling of NPI effectiveness. The dataset includes interventions from 114 regions in 7 European countries during the period from the 1st August 2020 to the 9th January 2021. The paper includes NPI definitions tailored to the second wave following an exploratory data collection. Each entry has been extensively validated by semi-independent double entry, comparison with existing datasets, and, when necessary, discussion with local epidemiologists. The dataset has considerable potential for use in disentangling the effectiveness of NPIs and comparing the impact of interventions across different phases of... [full abstract]
George Altman, Janvi Ahuja, Joshua Teperowsky Monrad, Gurpreet Dhaliwal, Charlie Rogers-Smith, Gavin Leech, Benedict Snodin, Jonas B. Sandbrink, Lukas Finnveden, Alexander John Norman, Sebastian B. Oehm, Julia Fabienne Sandkühler, Jan Kulveit, Seth Flaxman, Yarin Gal, Swapnil Mishra, Samir Bhatt, Mrinank Sharma, Sören Mindermann, Jan Brauner
Nature Scientific Data 9, Article number: 145 (2022)
[Paper]

Active Surrogate Estimators: An Active Learning Approach to Label-Efficient Model Evaluation
We propose Active Surrogate Estimators (ASEs), a new method for label-efficient model evaluation. Evaluating model performance is a challenging and important problem when labels are expensive. ASEs address this active testing problem using a surrogate-based estimation approach, whereas previous methods have focused on Monte Carlo estimates. ASEs actively learn the underlying surrogate, and we propose a novel acquisition strategy, XWING, that tailors this learning to the final estimation task. We find that ASEs offer greater label-efficiency than the current state-of-the-art when applied to challenging model evaluation problems for deep neural networks. We further theoretically analyze ASEs' errors.
Jannik Kossen, Sebastian Farquhar, Yarin Gal, Tom Rainforth
NeurIPS 2022
[OpenReview] [arXiv]

Prospect Pruning: Finding Trainable Weights at Initialization using Meta-Gradients
Pruning neural networks at initialization would enable us to find sparse models that retain the accuracy of the original network while consuming fewer computational resources for training and inference. However, current methods are insufficient to enable this optimization and lead to a large degradation in model performance. In this paper, we identify a fundamental limitation in the formulation of current methods, namely that their saliency criteria look at a single step at the start of training without taking into account the trainability of the network. While pruning iteratively and gradually has been shown to improve pruning performance, explicit consideration of the training stage that will immediately follow pruning has so far been absent from the computation of the saliency criterion. To overcome the short-sightedness of existing methods, we propose Prospect Pruning (ProsPr), which uses meta-gradients through the first few steps of optimization to determine which weights to p... [full abstract]
Milad Alizadeh, Shyam A. Tailor, Luisa Zintgraf, Joost van Amersfoort, Sebastian Farquhar, Nicholas Donald Lane, Yarin Gal
ICLR, 2022 [arXiv] [OpenReview] [BibTex]

DARTS without a Validation Set; Optimizing the Marginal Likelihood
The success of neural architecture search (NAS) has historically been limited by excessive compute requirements. While modern weight-sharing NAS methods such as DARTS are able to finish the search in single-digit GPU days, extracting the final best architecture from the shared weights is notoriously unreliable. Training-Speed-Estimate (TSE), a recently developed generalization estimator with a Bayesian marginal likelihood interpretation, has previously been used in place of the validation loss for gradient-based optimization in DARTS. This prevents the DARTS skip connection collapse, which significantly improves performance on NASBench-201 and the original DARTS search space. We extend those results by applying various DARTS diagnostics and show several unusual behaviors arising from not using a validation set. Furthermore, our experiments yield concrete examples of the depth gap and topology selection in DARTS having a strongly negative impact on the search performance despite gen... [full abstract]
Miroslav Fil, Binxin (Robin) Ru, Clare Lyle, Yarin Gal
5th Workshop on Meta-Learning, NeurIPS 2021
[Paper]

On Pathologies in KL-Regularized Reinforcement Learning from Expert Demonstrations
KL-regularized reinforcement learning from expert demonstrations has proved successful in improving the sample efficiency of deep reinforcement learning algorithms, allowing them to be applied to challenging physical real-world tasks. However, we show that KL-regularized reinforcement learning with behavioral policies derived from expert demonstrations suffers from hitherto unrecognized pathological behavior that can lead to slow, unstable, and suboptimal online training. We show empirically that the pathology occurs for commonly chosen behavioral policy classes and demonstrate its impact on sample efficiency and online policy performance. Finally, we show that the pathology can be remedied by specifying non-parametric behavioral policies and that doing so allows KL-regularized RL to significantly outperform state-of-the-art approaches on a variety of challenging locomotion and dexterous hand manipulation tasks.
Tim G. J. Rudner, Cong Lu, Michael A. Osborne, Yarin Gal, Yee Whye Teh
NeurIPS, 2021
ICLR Workshop on Robust and Reliable Machine Learning in the Real World, 2021
[OpenReview] [Website] [BibTex]

Outcome-Driven Reinforcement Learning via Variational Inference
While reinforcement learning algorithms provide automated acquisition of optimal policies, practical application of such methods requires a number of design decisions, such as manually designing reward functions that not only define the task, but also provide sufficient shaping to accomplish it. In this paper, we view reinforcement learning as inferring policies that achieve desired outcomes, rather than as a problem of maximizing rewards. To solve this inference problem, we establish a novel variational inference formulation that allows us to derive a well-shaped reward function which can be learned directly from environment interactions. From the corresponding variational objective, we also derive a new probabilistic Bellman backup operator and use it to develop an off-policy algorithm to solve goal-directed tasks. We empirically demonstrate that this method eliminates the need to hand-craft reward functions for a suite of diverse manipulation and locomotion tasks and leads to ef... [full abstract]
Tim G. J. Rudner, Vitchyr H. Pong, Rowan McAllister, Yarin Gal, Sergey Levine
NeurIPS, 2021
NeurIPS Workshop on Deep Reinforcement Learning, 2020
[arXiv] [OpenReview] [BibTex]

QU-BraTS: MICCAI BraTS 2020 Challenge on Quantifying Uncertainty in Brain Tumor Segmentation -- Analysis of Ranking Metrics and Benchmarking Results
Deep learning (DL) models have provided the state-of-the-art performance in a wide variety of medical imaging benchmarking challenges, including the Brain Tumor Segmentation (BraTS) challenges. However, the task of focal pathology multi-compartment segmentation (e.g., tumor and lesion sub-regions) is particularly challenging, and potential errors hinder the translation of DL models into clinical workflows. Quantifying the reliability of DL model predictions in the form of uncertainties, could enable clinical review of the most uncertain regions, thereby building trust and paving the way towards clinical translation. Recently, a number of uncertainty estimation methods have been introduced for DL medical image segmentation tasks. Developing metrics to evaluate and compare the performance of uncertainty measures will assist the end-user in making more informed decisions. In this study, we explore and evaluate a metric developed during the BraTS 2019-2020 task on uncertainty quantific... [full abstract]
Raghav Mehta, Angelos Filos, Spyridon Bakas, Yarin Gal, Tal Arbel
Preprint (19 Dec 2021)
[Paper]
Evaluating Approximate Inference in Bayesian Deep Learning
Uncertainty representation is crucial to the safe and reliable deployment of deep learning. Bayesian methods provide a natural mechanism to represent epistemic uncertainty, leading to improved generalization and calibrated predictive distributions. Understanding the fidelity of approximate inference has extraordinary value beyond the standard approach of measuring generalization on a particular task: if approximate inference is working correctly, then we can expect more reliable and accurate deployment across any number of real-world settings. In this competition, we evaluate the fidelity of approximate Bayesian inference procedures in deep learning, using as a reference Hamiltonian Monte Carlo (HMC) samples obtained by parallelizing computations over hundreds of tensor processing unit (TPU) devices. We consider a variety of tasks, including image recognition, regression, covariate shift, and medical applications. All data are publicly available, and we release several baselines, i... [full abstract]
Andrew Gordon Wilson, Sanae Lotfi, Sharad Vikram, Matthew D Hoffman, Yarin Gal, Yingzhen Li, Melanie F Pradier, Andrew Foong, Sebastian Farquhar, Pavel Izmailov
Proceedings of Machine Learning Research, 176;113-114
[paper]

Benchmarking Bayesian Deep Learning on Diabetic Retinopathy Detection Tasks
Bayesian deep learning seeks to equip deep neural networks with the ability to precisely quantify their predictive uncertainty, and has promised to make deep learning more reliable for safety-critical real-world applications. Yet, existing Bayesian deep learning methods fall short of this promise; new methods continue to be evaluated on unrealistic test beds that do not reflect the complexities of downstream real-world tasks that would benefit most from reliable uncertainty quantification. We propose a set of real-world tasks that accurately reflect such complexities and are designed to assess the reliability of predictive models in safety-critical scenarios. Specifically, we curate two publicly available datasets of high-resolution human retina images exhibiting varying degrees of diabetic retinopathy, a medical condition that can lead to blindness, and use them to design a suite of automated diagnosis tasks that require reliable predictive uncertainty quantification. We use these... [full abstract]
Neil Band, Tim G. J. Rudner, Qixuan Feng, Angelos Filos, Zachary Nado, Michael W. Dusenberry, Ghassen Jerfel, Dustin Tran, Yarin Gal
NeurIPS Datasets and Benchmarks Track, 2021
Spotlight Talk, NeurIPS Workshop on Distribution Shifts, 2021
Symposium on Machine Learning for Health (ML4H) Extended Abstract Track, 2021
NeurIPS Workshop on Bayesian Deep Learning, 2021
[OpenReview] [Code] [BibTex]
Speedy Performance Estimation for Neural Architecture Search
Reliable yet efficient evaluation of generalisation performance of a proposed architecture is crucial to the success of neural architecture search (NAS). Traditional approaches face a variety of limitations: training each architecture to completion is prohibitively expensive, early stopped validation accuracy may correlate poorly with fully trained performance, and model-based estimators require large training sets. We instead propose to estimate the final test performance based on a simple measure of training speed. Our estimator is theoretically motivated by the connection between generalisation and training speed, and is also inspired by the reformulation of a PAC-Bayes bound under the Bayesian setting. Our model-free estimator is simple, efficient, and cheap to implement, and does not require hyperparameter-tuning or surrogate training before deployment. We demonstrate on various NAS search spaces that our estimator consistently outperforms other alternatives in achieving bette... [full abstract]
Binxin (Robin) Ru, Clare Lyle, Lisa Schut, Miroslav Fil, Mark van der Wilk, Yarin Gal
NeurIPS 2021
[Paper]

Uncertainty Baselines: Benchmarks for Uncertainty & Robustness in Deep Learning
High-quality estimates of uncertainty and robustness are crucial for numerous real-world applications, especially for deep learning which underlies many deployed ML systems. The ability to compare techniques for improving these estimates is therefore very important for research and practice alike. Yet, competitive comparisons of methods are often lacking due to a range of reasons, including: compute availability for extensive tuning, incorporation of sufficiently many baselines, and concrete documentation for reproducibility. In this paper we introduce Uncertainty Baselines: high-quality implementations of standard and state-of-the-art deep learning methods on a variety of tasks. As of this writing, the collection spans 19 methods across 9 tasks, each with at least 5 metrics. Each baseline is a self-contained experiment pipeline with easily reusable and extendable components. Our goal is to provide immediate starting points for experimentation with new methods or applications. Addi... [full abstract]
Zachary Nado, Neil Band, Mark Collier, Josip Djolonga, Michael W. Dusenberry, Sebastian Farquhar, Angelos Filos, Marton Havasi, Rodolphe Jenatton, Ghassen Jerfel, Jeremiah Liu, Zelda Mariet, Jeremy Nixon, Shreyas Padhy, Jie Ren, Tim G. J. Rudner, Yeming Wen, Florian Wenzel, Kevin Murphy, D. Sculley, Balaji Lakshminarayanan, Jasper Snoek, Yarin Gal, Dustin Tran
NeurIPS Workshop on Bayesian Deep Learning, 2021
[arXiv] [Code] [Blog Post (Google AI)] [BibTex]

Disease variant prediction with deep generative models of evolutionary data
Quantifying the pathogenicity of protein variants in human disease-related genes would have a marked effect on clinical decisions, yet the overwhelming majority (over 98%) of these variants still have unknown consequences. In principle, computational methods could support the large-scale interpretation of genetic variants. However, state-of-the-art methods have relied on training machine learning models on known disease labels. As these labels are sparse, biased and of variable quality, the resulting models have been considered insufficiently reliable. Here we propose an approach that leverages deep generative models to predict variant pathogenicity without relying on labels. By modelling the distribution of sequence variation across organisms, we implicitly capture constraints on the protein sequences that maintain fitness. Our model EVE (evolutionary model of variant effect) not only outperforms computational approaches that rely on labelled data but also performs on par with, if... [full abstract]
Jonathan Frazer, Pascal Notin, Mafalda Dias, Aidan Gomez, Joseph K. Min, Kelly Brock, Yarin Gal, Debora Marks
Nature, 2021 (volume 599, pages 91–95)
[Paper] [BibTex] [Preprint] [Website] [Code]

Using Non-Linear Causal Models to Study Aerosol-Cloud Interactions in the Southeast Pacific
Aerosol-cloud interactions include a myriad of effects that all begin when aerosol enters a cloud and acts as cloud condensation nuclei (CCN). An increase in CCN results in a decrease in the mean cloud droplet size (r$_{e}$). The smaller droplet size leads to brighter, more expansive, and longer lasting clouds that reflect more incoming sunlight, thus cooling the earth. Globally, aerosol-cloud interactions cool the Earth, however the strength of the effect is heterogeneous over different meteorological regimes. Understanding how aerosol-cloud interactions evolve as a function of the local environment can help us better understand sources of error in our Earth system models, which currently fail to reproduce the observed relationships. In this work we use recent non-linear, causal machine learning methods to study the heterogeneous effects of aerosols on cloud droplet radius.
Andrew Jesson, Peter Manshausen, Alyson Douglas, Duncan Watson-Parris, Yarin Gal, Philip Stier
Workshops on Tackling Climate Change with Machine Learning, and Causal Inference & Machine Learning: Why now?, NeurIPS 2021
[Paper]

DeDUCE; Generating Counterfactual Explanations At Scale
When an image classifier outputs a wrong class label, it can be helpful to see what changes in the image would lead to a correct classification. This is the aim of algorithms generating counterfactual explanations. However, there is no easily scalable method to generate such counterfactuals. We develop a new algorithm providing counterfactual explanations for large image classifiers trained with spectral normalisation at low computational cost. We empirically compare this algorithm against baselines from the literature; our novel algorithm consistently finds counterfactuals that are much closer to the original inputs. At the same time, the realism of these counterfactuals is comparable to the baselines.
Benedikt Höltgen, Lisa Schut, Jan Brauner, Yarin Gal
Open Review (19 Dec 2021)
[Paper]
Understanding the effectiveness of government interventions against the resurgence of COVID-19 in Europe
Governments are attempting to control the COVID-19 pandemic with nonpharmaceutical interventions (NPIs). However, the effectiveness of different NPIs at reducing transmission is poorly understood. We gathered chronological data on the implementation of NPIs for several European, and other, countries between January and the end of May 2020. We estimate the effectiveness of NPIs, ranging from limiting gathering sizes, business closures, and closure of educational institutions to stay-at-home orders. To do so, we used a Bayesian hierarchical model that links NPI implementation dates to national case and death counts and supported the results with extensive empirical validation. Closing all educational institutions, limiting gatherings to 10 people or less, and closing face-to-face businesses each reduced transmission considerably. The additional effect of stay-at-home orders was comparatively small.
Mrinank Sharma, Sören Mindermann, Charlie Rogers-Smith, Gavin Leech, Benedict Snodin, Janvi Ahuja, Jonas B. Sandbrink, Joshua Teperowsky Monrad, George Altman, Gurpreet Dhaliwal, Lukas Finnveden, Alexander John Norman, Sebastian B. Oehm, Julia Fabienne Sandkühler, Laurence Aitchison, Tomas Gavenciak, Thomas Mellan, Jan Kulveit, Leonid Chindelevitch, Seth Flaxman, Yarin Gal, Swapnil Mishra, Samir Bhatt, Jan Brauner
Nature Communications (2021) 12: 5820
[Paper]

Deep Deterministic Uncertainty for Semantic Segmentation
We extend Deep Deterministic Uncertainty (DDU), a method for uncertainty estimation using feature space densities, to semantic segmentation. DDU enables quantifying and disentangling epistemic and aleatoric uncertainty in a single forward pass through the model. We study the similarity of feature representations of pixels at different locations for the same class and conclude that it is feasible to apply DDU location independently, which leads to a significant reduction in memory consumption compared to pixel dependent DDU. Using the DeepLab-v3+ architecture on Pascal VOC 2012, we show that DDU improves upon MC Dropout and Deep Ensembles while being significantly faster to compute.
Jishnu Mukhoti, jv, Philip HS Torr, Yarin Gal
arXiv (2021)
[Paper]
Physics informed deep learning to super-resolve and cross-calibrate solar magnetograms
Super-resolution techniques aim to increase the resolution of images by adding detail. Compared to upsampling techniques reliant on interpolation, deep learning-based approaches learn features and their relationships across the training data set to leverage prior knowledge on what low resolution patterns look like in higher resolution images. As an added benefit, deep neural networks can learn the systematic properties of the target images (ie texture), combining super-resolution with instrument cross-calibration. While the successful use of super-resolution algorithms for natural images is rooted in creating perceptually convincing results, super-resolution applied to scientific data requires careful quantitative evaluation of performances. In this work, we demonstrate that deep learning can increase the resolution and calibrate space-and ground-based imagers belonging to different instrumental generations. In addition, we establish a set of measurements to benchmark the performan... [full abstract]
Andres Munoz-Jaramillo, Anna Jungbluth, Xavier Gitiaux, Paul Wright, Carl Shneider, Shane Maloney, Atılım Güneş Baydin, Yarin Gal, Michel Deudon, Freddie Kalaitzis
Research Square
[Paper]

Causal-BALD: Deep Bayesian Active Learning of Outcomes to Infer Treatment-Effects
Estimating personalized treatment effects from high-dimensional observational data is essential in situations where experimental designs are infeasible, unethical or expensive. Existing approaches rely on fitting deep models on outcomes observed for treated and control populations, but when measuring the outcome for an individual is costly (e.g. biopsy) a sample efficient strategy for acquiring outcomes is required. Deep Bayesian active learning provides a framework for efficient data acquisition by selecting points with high uncertainty. However, naive application of existing methods selects training data that is biased toward regions where the treatment effect cannot be identified because there is non-overlapping support between the treated and control populations. To maximize sample efficiency for learning personalized treatment effects, we introduce new acquisition functions grounded in information theory that bias data acquisition towards regions where overlap is satisfied, by... [full abstract]
Andrew Jesson, Panagiotis Tigas, Joost van Amersfoort, Andreas Kirsch, Uri Shalit, Yarin Gal
NeurIPS, 2021
[Paper]

Shifts: A Dataset of Real Distributional Shift Across Multiple Large-Scale Tasks
There has been significant research done on developing methods for improving robustness to distributional shift and uncertainty estimation. In contrast, only limited work has examined developing standard datasets and benchmarks for assessing these approaches. Additionally, most work on uncertainty estimation and robustness has developed new techniques based on small-scale regression or image classification tasks. However, many tasks of practical interest have different modalities, such as tabular data, audio, text, or sensor data, which offer significant challenges involving regression and discrete or continuous structured prediction. Thus, given the current state of the field, a standardized large-scale dataset of tasks across a range of modalities affected by distributional shifts is necessary. This will enable researchers to meaningfully evaluate the plethora of recently developed uncertainty quantification methods, as well as assessment criteria and state-of-the-art baselines.... [full abstract]
Andrey Malinin, Neil Band, Alexander Ganshin, German Chesnokov, Yarin Gal, Mark J. F. Gales, Alexey Noskov, Andrey Ploskonosov, Liudmila Prokhorenkova, Ivan Provilkov, Vatsal Raina, Vyas Raina, Denis Roginskiy, Mariya Shmatova, Panagiotis Tigas, Boris Yangel
NeurIPS Datasets and Benchmarks Track, 2021
[arXiv] [BibTex] [Code]
[Competition Website] [Blog Post (OATML)] [Blog Post (Yandex Research)]

Self-Attention Between Datapoints: Going Beyond Individual Input-Output Pairs in Deep Learning
We challenge a common assumption underlying most supervised deep learning: that a model makes a prediction depending only on its parameters and the features of a single input. To this end, we introduce a general-purpose deep learning architecture that takes as input the entire dataset instead of processing one datapoint at a time. Our approach uses self-attention to reason about relationships between datapoints explicitly, which can be seen as realizing non-parametric models using parametric attention mechanisms. However, unlike conventional non-parametric models, we let the model learn end-to-end from the data how to make use of other datapoints for prediction. Empirically, our models solve cross-datapoint lookup and complex reasoning tasks unsolvable by traditional deep learning models. We show highly competitive results on tabular data, early results on CIFAR-10, and give insight into how the model makes use of the interactions between points.
Jannik Kossen, Neil Band, Clare Lyle, Aidan Gomez, Yarin Gal, Tom Rainforth
NeurIPS, 2021
[OpenReview] [arXiv] [Code]
Changing composition of SARS-CoV-2 lineages and rise of Delta variant in England
Background Since its emergence in Autumn 2020, the SARS-CoV-2 Variant of Concern (VOC) B.1.1.7 (WHO label Alpha) rapidly became the dominant lineage across much of Europe. Simultaneously, several other VOCs were identified globally. Unlike B.1.1.7, some of these VOCs possess mutations thought to confer partial immune escape. Understanding when and how these additional VOCs pose a threat in settings where B.1.1.7 is currently dominant is vital. Methods We examine trends in the prevalence of non-B.1.1.7 lineages in London and other English regions using passive-case detection PCR data, cross-sectional community infection surveys, genomic surveillance, and wastewater monitoring. The study period spans from 31st January 2021 to 15th May 2021. Findings Across data sources, the percentage of non-B.1.1.7 variants has been increasing since late March 2021. This increase was initially driven by a variety of lineages with immune escape. From mid-April, B.1.617.2 (WHO label Delta) spread ra... [full abstract]
Swapnil Mishra, Sören Mindermann, Mrinank Sharma, Charles Whittaker, Thomas A. Mellan, Thomas Wilton, Dimitra Klapsa, Ryan Mate, Martin Fritzsche, Maria Zambon, Janvi Ahuja, Adam Howes, Xenia Miscouridou, Guy P. Nason, Oliver Ratmann, Elizaveta Semenova, Gavin Leech, Julia Fabienne Sandkühler, Charlie Rogers-Smith, Michaela Vollmer, H. Juliette T. Unwin, Yarin Gal, Meera Chand, Axel Gandy, Javier Martin, Erik Volz, Neil M. Ferguson, Samir Bhatt, Jan Brauner, Seth Flaxman
EClinicalMedicine (2021), 39:101064
[Paper]

Resolving Causal Confusion in Reinforcement Learning via Robust Exploration
A reinforcement learning agent must distinguish between spurious correlations and causal relationships in its environment in order to robustly achieve its goals. Causal confusion has been defined and studied in various constrained settings, like imitation learning and the partial observability setting with latent confounders. We now show that causal confusion can also occur in online reinforcement learning (RL) settings. We formalize the problem of identifying causal structure in a Markov Decision Process and highlight the central role played by the data collection policy in identifying and avoiding spurious correlations. We find that under insufficient exploration, many RL algorithms, including those with PAC-MDP guarantees, fall prey to causal confusion under insufficient exploration policies. To address this, we present a robust exploration strategy which enables causal hypothesis-testing by interaction with the environment. Our method outperforms existing state-of-the-art a... [full abstract]
Clare Lyle, Amy Zhang, Minqui Jiang, Joelle Pineau, Yarin Gal
Self-Supervision for Reinforcement Learning Workshop-ICLR 2021
[Paper]
Propagating Uncertainty Across Cascaded Medical Imaging Tasks for Improved Deep Learning Inference
Although deep networks have been shown to perform very well on a variety of medical imaging tasks, inference in the presence of pathology presents several challenges to common models. These challenges impede the integration of deep learning models into real clinical workflows, where the customary process of cascading deterministic outputs from a sequence of image-based inference steps (e.g. registration, segmentation) generally leads to an accumulation of errors that impacts the accuracy of downstream inference tasks. In this paper, we propose that by embedding uncertainty estimates across cascaded inference tasks, performance on the downstream inference tasks should be improved. We demonstrate the effectiveness of the proposed approach in three different clinical contexts: (i) We demonstrate that by propagating T2 weighted lesion segmentation results and their associated uncertainties, subsequent T2 lesion detection performance is improved when evaluated on a proprietary large-sca... [full abstract]
Raghav Mehta, Thomas Christinck, Tanya Nair, Aurélie Bussy, Swapna Premasiri, Manuela Costantino, M. Mallar Chakravarthy, Douglas L. Arnold, Yarin Gal, Tal Arbel
IEEE Transactions on Medical Imaging, Vol. 41, No. 2 (2022)
[IEEE T-MI]

Galaxy Zoo DECaLS: Detailed visual morphology measurements from volunteers and Deep Learning for 314,000 galaxies
We present Galaxy Zoo DECaLS: detailed visual morphological classifications for Dark Energy Camera Legacy Survey images of galaxies within the SDSS DR8 footprint. Deeper DECaLS images (r = 23.6 versus r = 22.2 from SDSS) reveal spiral arms, weak bars, and tidal features not previously visible in SDSS imaging. To best exploit the greater depth of DECaLS images, volunteers select from a new set of answers designed to improve our sensitivity to mergers and bars. Galaxy Zoo volunteers provide 7.5 million individual classifications over 314 000 galaxies. 140 000 galaxies receive at least 30 classifications, sufficient to accurately measure detailed morphology like bars, and the remainder receive approximately 5. All classifications are used to train an ensmble of Bayesian convolutional neural networks (a state-of-the-art deep learning method) to predict posteriors for the detailed morphology of all 314 000 galaxies. We use active learning to focus our volunteer effort on the galaxies wh... [full abstract]
Mike Walmsley, Chris Lintott, Tobias Géron, Sandor Kruk, Coleman Krawczyk, Kyle W Willett, Steven Bamford, Lee S Kelvin, Lucy Fortson, Yarin Gal, William Keel, Karen L Masters, Vihang Mehta, Brooke D Simmons, Rebecca Smethurst, Lewis Smith, Elisabeth M Baeten, Christine Macmillan
Monthly Notices of the Royal Astronomical Society
[Paper]

Improving black-box optimization in VAE latent space using decoder uncertainty
Optimization in the latent space of variational autoencoders is a promising approach to generate high-dimensional discrete objects that maximize an expensive black-box property (e.g., drug-likeness in molecular generation, function approximation with arithmetic expressions). However, existing methods lack robustness as they may decide to explore areas of the latent space for which no data was available during training and where the decoder can be unreliable, leading to the generation of unrealistic or invalid objects. We propose to leverage the epistemic uncertainty of the decoder to guide the optimization process. This is not trivial though, as a naive estimation of uncertainty in the high-dimensional and structured settings we consider would result in high estimator variance. To solve this problem, we introduce an importance sampling-based estimator that provides more robust estimates of epistemic uncertainty. Our uncertainty-guided optimization approach does not require modifica... [full abstract]
Pascal Notin, José Miguel Hernández-Lobato, Yarin Gal
NeurIPS, 2021
[Preprint] [Proceedings] [BibTex] [Code]

Deterministic Neural Networks with Inductive Biases Capture Epistemic and Aleatoric Uncertainty
While Deep Ensembles are the state-of-the art for uncertainty prediction, standard softmax neural nets suffer from feature collapse and cannot disentangle aleatoric and epistemic uncertainty. We show that a single softmax neural net with minimal changes can beat epistemic uncertainty predictions of Deep Ensembles and other complex single-forward-pass uncertainty approaches (DUQ and SNGP) while also disentangling uncertainties. Our *Deep Deterministic Uncertainty (DDU)* is based on three insights: i) predictive entropy confounds aleatoric and epistemic uncertainty, and softmax entropy is inconsistent for OoD points; ii) with appropriate inductive biases, i.e. residual connections and spectral normalization, feature-space density reliably captures epistemic uncertainty; and, iii) density estimation and classification objectives might have different optima. Thus, DDU disentangles aleatoric uncertainty using softmax entropy and epistemic uncertainty using a separate feature-space de... [full abstract]
Jishnu Mukhoti, Andreas Kirsch, Joost van Amersfoort, Philip H.S. Torr, Yarin Gal
Uncertainty & Robustness in Deep Learning Workshop, ICML, 2021
[Paper] [BibTex] [Poster]

On Pitfalls in OoD Detection: Entropy Considered Harmful
Entropy of a predictive distribution averaged over an ensemble or several posterior weight samples is often used as a metric for Out-of-Distribution (OoD) detection. However, we show that predictive entropy is inappropriate for this task because it mistakes ambiguous in-distribution samples as OoD. This issue remains hidden on curated datasets commonly used for benchmarking. We introduce a new dataset, Dirty-MNIST, with a long tail of ambiguous samples, which exemplifies this problem. Additionally, we look at the entropy of single, deterministic, softmax models and show that it is unreliable *exactly* for OoD samples. In summary, we caution against using predictive or softmax entropy for OoD detection in practice and introduce several methods to evaluate the quantitative difference between several uncertainty metrics.
Andreas Kirsch, Jishnu Mukhoti, Joost van Amersfoort, Philip H.S. Torr, Yarin Gal
Uncertainty & Robustness in Deep Learning Workshop, ICML, 2021
[Paper] [BibTex] [Poster]

Can convolutional ResNets approximately preserve input distances? A frequency analysis perspective
ResNets constrained to be bi-Lipschitz, that is, approximately distance preserving, have been a crucial component of recently proposed techniques for deterministic uncertainty quantification in neural models. We show that theoretical justifications for recent regularisation schemes trying to enforce such a constraint suffer from a crucial flaw -- the theoretical link between the regularisation scheme used and bi-Lipschitzness is only valid under conditions which do not hold in practice, rendering existing theory of limited use, despite the strong empirical performance of these models. We provide a theoretical explanation for the effectiveness of these regularisation schemes using a frequency analysis perspective, showing that under mild conditions these schemes will enforce a lower Lipschitz bound on the low-frequency projection of images. We then provide empirical evidence supporting our theoretical claims, and perform further experiments which demonstrate that our broader conclus... [full abstract]
Lewis Smith, jv, Haiwen Huang, Stephen Roberts, Yarin Gal
arXiv (2022)
[Paper]
Cross-calibration, super-resolution, and uncertainty estimation of the conversion of MDI and GONG to HMI full-disk magnetograms using deep learning
Over the past 50 years, a variety of instruments have obtained images of the Sun's magnetic field (magnetograms) to study its origin and evolution. While improvements in instrumentation have led to breakthroughs in our understanding of physical phenomena, differences between subsequent instruments such as resolution, noise, and saturation levels all introduce inhomogeneities into long-term data sets. This has proven to be an insurmountable obstacle for research applications that require high-resolution and homogeneous data spanning time frames longer than the lifetime of a single instrument. Here we show that deep-learning-based super-resolution techniques can successfully up-sample and homogenize solar magnetic field images obtained both by space and ground-based instruments. In particular, we show the results of cross-calibrating and super-resolving MDI and GONG magnetograms to the characteristics of HMI. We also discuss the importance of agreeing on a standardized set of tra... [full abstract]
A Munoz-Jaramillo, A Jungbluth, X Gitiaux, P Wright, C Shneider, S Maloney, Freddie Kalaitzis, Atılım Güneş Baydin, Yarin Gal, M Deudon
Bulletin of the American Astronomical Society
[paper]

On Signal-to-Noise Ratio Issues in Variational Inference for Deep Gaussian Processes
We show that the gradient estimates used in training Deep Gaussian Processes (DGPs) with importance-weighted variational inference are susceptible to signal-to-noise ratio (SNR) issues. Specifically, we show both theoretically and empirically that the SNR of the gradient estimates for the latent variable's variational parameters decreases as the number of importance samples increases. As a result, these gradient estimates degrade to pure noise if the number of importance samples is too large. To address this pathology, we show how doubly-reparameterized gradient estimators, originally proposed for training variational autoencoders, can be adapted to the DGP setting and that the resultant estimators completely remedy the SNR issue, thereby providing more reliable training. Finally, we demonstrate that our fix can lead to improvements in the predictive performance of the model's predictive posterior.
Tim G. J. Rudner, Oscar Key, Yarin Gal, Tom Rainforth
ICML, 2021
[arXiv] [Code] [BibTex]

PsiPhi-Learning: Reinforcement Learning with Demonstrations using Successor Features and Inverse Temporal Difference Learning
We study reinforcement learning (RL) with no-reward demonstrations, a setting in which an RL agent has access to additional data from the interaction of other agents with the same environment. However, it has no access to the rewards or goals of these agents, and their objectives and levels of expertise may vary widely. These assumptions are common in multi-agent settings, such as autonomous driving. To effectively use this data, we turn to the framework of successor features. This allows us to disentangle shared features and dynamics of the environment from agent-specific rewards and policies. We propose a multi-task inverse reinforcement learning (IRL) algorithm, called _inverse temporal difference learning_ (ITD), that learns shared state features, alongside per-agent successor features and preference vectors, purely from demonstrations without reward labels. We further show how to seamlessly integrate ITD with learning from online environment interactions, arriving at a novel a... [full abstract]
Angelos Filos, Clare Lyle, Yarin Gal, Sergey Levine, Natasha Jaques, Gregory Farquhar
ICML, 2021 (long talk)
[Paper]
Active Testing: Sample-Efficient Model Evaluation
We introduce active testing: a new framework for sample-efficient model evaluation. While approaches like active learning reduce the number of labels needed for model training, existing literature largely ignores the cost of labeling test data, typically unrealistically assuming large test sets for model evaluation. This creates a disconnect to real applications where test labels are important and just as expensive, e.g. for optimizing hyperparameters. Active testing addresses this by carefully selecting the test points to label, ensuring model evaluation is sample-efficient. To this end, we derive theoretically-grounded and intuitive acquisition strategies that are specifically tailored to the goals of active testing, noting these are distinct to those of active learning. Actively selecting labels introduces a bias; we show how to remove that bias while reducing the variance of the estimator at the same time. Active testing is easy to implement, effective, and can be applied to an... [full abstract]
Jannik Kossen, Sebastian Farquhar, Yarin Gal, Tom Rainforth
ICML, 2021
[PMLR] [arXiv]

Quantifying Ignorance in Individual-Level Causal-Effect Estimates under Hidden Confounding
We study the problem of learning conditional average treatment effects (CATE) from high-dimensional, observational data with unobserved confounders. Unobserved confounders introduce ignorance -- a level of unidentifiability -- about an individual's response to treatment by inducing bias in CATE estimates. We present a new parametric interval estimator suited for high-dimensional data, that estimates a range of possible CATE values when given a predefined bound on the level of hidden confounding. Further, previous interval estimators do not account for ignorance about the CATE stemming from samples that may be underrepresented in the original study, or samples that violate the overlap assumption. Our novel interval estimator also incorporates model uncertainty so that practitioners can be made aware of out-of-distribution data. We prove that our estimator converges to tight bounds on CATE when there may be unobserved confounding, and assess it using semi-synthetic, high-dimensional ... [full abstract]
Andrew Jesson, Sören Mindermann, Yarin Gal, Uri Shalit
ICML, 2021
[arXiv]
Understanding the effectiveness of government interventions in Europe's second wave of COVID-19
As European governments face resurging waves of COVID-19, non-pharmaceutical interventions (NPIs) continue to be the primary tool for infection control. However, updated estimates of their relative effectiveness have been absent for Europe's second wave, largely due to a lack of collated data that considers the increased subnational variation and diversity of NPIs. We collect the largest dataset of NPI implementation dates in Europe, spanning 114 subnational areas in 7 countries, with a systematic categorisation of interventions tailored to the second wave. Using a hierarchical Bayesian transmission model, we estimate the effectiveness of 17 NPIs from local case and death data. We manually validate the data, address limitations in modelling from previous studies, and extensively test the robustness of our estimates. The combined effect of all NPIs was smaller relative to estimates from the first half of 2020, indicating the strong influence of safety measures and individual protect... [full abstract]
Mrinank Sharma, Sören Mindermann, Charlie Rogers-Smith, Gavin Leech, Benedict Snodin, Janvi Ahuja, Jonas B. Sandbrink, Joshua Teperowski Monrad, George Altman, Gurpreet Dhaliwal, Lukas Finnveden, Alexander John Norman, Sebastian B. Oehm, Julia Fabienne Sandkühler, Thomas Mellan, Jan Kulveit, Leonid Chindelevitch, Seth Flaxman, Yarin Gal, Swapnil Mishra, Jan Brauner, Samir Bhatt
MedRxiv
[Paper]
Generating Interpretable Counterfactual Explanations By Implicit Minimisation of Epistemic and Aleatoric Uncertainties
Counterfactual explanations (CEs) are a practical tool for demonstrating why machine learning classifiers make particular decisions. For CEs to be useful, it is important that they are easy for users to interpret. Existing methods for generating interpretable CEs rely on auxiliary generative models, which may not be suitable for complex datasets, and incur engineering overhead. We introduce a simple and fast method for generating interpretable CEs in a white-box setting without an auxiliary model, by using the predictive uncertainty of the classifier. Our experiments show that our proposed algorithm generates more interpretable CEs, according to IM1 scores, than existing methods. Additionally, our approach allows us to estimate the uncertainty of a CE, which may be important in safety-critical applications, such as those in the medical domain.
Lisa Schut, Oscar Key, Rory McGrath, Luca Costabello, Bogdan Sacaleanu, Medb Corcoran, Yarin Gal
AISTATS, 2021
[Paper] [Code]

Towards global flood mapping onboard low cost satellites with machine learning
Spaceborne Earth observation is a key technology for flood response, offering valuable information to decision makers on the ground. Very large constellations of small, nano satellites— ’CubeSats’ are a promising solution to reduce revisit time in disaster areas from days to hours. However, data transmission to ground receivers is limited by constraints on power and bandwidth of CubeSats. Onboard processing offers a solution to decrease the amount of data to transmit by reducing large sensor images to smaller data products. The ESA’s recent PhiSat-1 mission aims to facilitate the demonstration of this concept, providing the hardware capability to perform onboard processing by including a power-constrained machine learning accelerator and the software to run custom applications. This work demonstrates a flood segmentation algorithm that produces flood masks to be transmitted instead of the raw images, while running efficiently on the accelerator aboard the PhiSat-1. Our models are t... [full abstract]
Gonzalo Mateo-Garcia, Joshua Veitch-Michealis, Lewis Smith, Silviu Oprea, Guy Schumann, Yarin Gal, Atılım Güneş Baydin, Dietmar Backes
Nature Scientific Reports, 2021
[Paper]

Robustness to Pruning Predicts Generalization in Deep Neural Networks
Existing generalization measures that aim to capture a model's simplicity based on parameter counts or norms fail to explain generalization in overparameterized deep neural networks. In this paper, we introduce a new, theoretically motivated measure of a network's simplicity which we call prunability: the smallest \emph{fraction} of the network's parameters that can be kept while pruning without adversely affecting its training loss. We show that this measure is highly predictive of a model's generalization performance across a large set of convolutional networks trained on CIFAR-10, does not grow with network size unlike existing pruning-based measures, and exhibits high correlation with test set loss even in a particularly challenging double descent setting. Lastly, we show that the success of prunability cannot be explained by its relation to known complexity measures based on models' margin, flatness of minima and optimization speed, finding that our new measure is similar to -... [full abstract]
Lorenz Kuhn, Clare Lyle, Aidan Gomez, Jonas Rothfuss, Yarin Gal
arXiv
[paper]

Uncertainty Quantification for virtual diagnostic of particle accelerators
Virtual diagnostic (VD) is a computational tool based on deep learning that can be used to predict a diagnostic output. VDs are especially useful in systems where measuring the output is invasive, limited, costly or runs the risk of altering the output. Given a prediction, it is necessary to relay how reliable that prediction is, i.e., quantify the uncertainty of the prediction. In this paper, we use ensemble methods and quantile regression neural networks to explore different ways of creating and analyzing prediction’s uncertainty on experimental data from the Linac Coherent Light Source at SLAC National Lab. We aim to accurately and confidently predict the current profile or longitudinal phase space images of the electron beam. The ability to make iformed decisions under uncertainty is crucial for reliable deployment of deep learning tools on safety-critical systems as particle accelerators.
Owen Convery, Lewis Smith, Yarin Gal, Adi Hanuka
Physical Review Accelerators and Beams
[Paper]

Invariant Representations for Reinforcement Learning without Reconstruction
We study how representation learning can accelerate reinforcement learning from rich observations, such as images, without relying either on domain knowledge or pixel-reconstruction. Our goal is to learn representations that provide for effective downstream control and invariance to task-irrelevant details. Bisimulation metrics quantify behavioral similarity between states in continuous MDPs, which we propose using to learn robust latent representations which encode only the task-relevant information from observations. Our method trains encoders such that distances in latent space equal bisimulation distances in state space. We demonstrate the effectiveness of our method at disregarding task-irrelevant information using modified visual MuJoCo tasks, where the background is replaced with moving distractors and natural videos, while achieving SOTA performance. We also test a first-person highway driving task where our method learns invariance to clouds, weather, and time of day. Fina... [full abstract]
Amy Zhang, Rowan McAllister, Roberto Calandra, Yarin Gal, Sergey Levine
ICLR, 2021 (Oral)
[Paper]

Multi-Channel Auto-Calibration for the Atmospheric Imaging Assembly using Machine Learning
Solar activity plays a quintessential role in influencing the interplanetary medium and space-weather around the Earth. Remote sensing instruments onboard heliophysics space missions provide a pool of information about the Sun's activity via the measurement of its magnetic field and the emission of light from the multi-layered, multi-thermal, and dynamic solar atmosphere. Extreme UV (EUV) wavelength observations from space help in understanding the subtleties of the outer layers of the Sun, namely the chromosphere and the corona. Unfortunately, such instruments, like the Atmospheric Imaging Assembly (AIA) onboard NASA's Solar Dynamics Observatory (SDO), suffer from time-dependent degradation, reducing their sensitivity. Current state-of-the-art calibration techniques rely on periodic sounding rockets, which can be infrequent and rather unfeasible for deep-space missions. We present an alternative calibration approach based on convolutional neural networks (CNNs). We use SDO-AIA dat... [full abstract]
Luiz F. G. Dos Santos, Souvik Bose, Valentina Salvatelli, Brad Neuberg, Mark C. M. Cheung, Miho Janvier, Meng Jin, Yarin Gal, Paul Boerner, Atılım Güneş Baydin
Astronomy & Astrophysics, 2021
[Paper] [arXiv]
Large-scale clinical interpretation of genetic variants using evolutionary data and deep learning
Quantifying the pathogenicity of protein variants in human disease-related genes would have a profound impact on clinical decisions, yet the overwhelming majority (over 98%) of these variants still have unknown consequences1–3. In principle, computational methods could support the large-scale interpretation of genetic variants. However, prior methods4–7 have relied on training machine learning models on available clinical labels. Since these labels are sparse, biased, and of variable quality, the resulting models have been considered insufficiently reliable8. By contrast, our approach leverages deep generative models to predict the clinical significance of protein variants without relying on labels. The natural distribution of protein sequences we observe across organisms is the result of billions of evolutionary experiments9,10. By modeling that distribution, we implicitly capture constraints on the protein sequences that maintain fitness. Our model EVE (Evolutionary model of Vari... [full abstract]
Jonathan Frazer, Pascal Notin, Mafalda Dias, Aidan Gomez, Kelly Brock, Yarin Gal, Debora S Marks
BioRXiv
[paper]
On Statistical Bias In Active Learning: How and When to Fix It
Active learning is a powerful tool when labelling data is expensive, but it introduces a bias because the training data no longer follows the population distribution. We formalize this bias and investigate the situations in which it can be harmful and sometimes even helpful. We further introduce novel corrective weights to remove bias when doing so is beneficial. Through this, our work not only provides a useful mechanism that can improve the active learning approach, but also an explanation for the empirical successes of various existing approaches which ignore this bias. In particular, we show that this bias can be actively helpful when training overparameterized models---like neural networks---with relatively modest dataset sizes.
Sebastian Farquhar, Yarin Gal, Tom Rainforth
ICLR, 2021 (Spotlight)
[Paper]

Identifying Causal-Effect Inference Failure with Uncertainty-Aware Models
Recommending the best course of action for an individual is a major application of individual-level causal effect estimation. This application is often needed in safety-critical domains such as healthcare, where estimating and communicating uncertainty to decision-makers is crucial. We introduce a practical approach for integrating uncertainty estimation into a class of state-of-the-art neural network methods used for individual-level causal estimates. We show that our methods enable us to deal gracefully with situations of "no-overlap", common in high-dimensional data, where standard applications of causal effect approaches fail. Further, our methods allow us to handle covariate shift, where the train and test distributions differ, common when systems are deployed in practice. We show that when such a covariate shift occurs, correctly modeling uncertainty can keep us from giving overconfident and potentially harmful recommendations. We demonstrate our methodology with a range of s... [full abstract]
Andrew Jesson, Sören Mindermann, Uri Shalit, Yarin Gal
NeurIPS 2020
[paper]
Inferring the effectiveness of government interventions against COVID-19
Governments are attempting to control the COVID-19 pandemic with nonpharmaceutical interventions (NPIs). However, the effectiveness of different NPIs at reducing transmission is poorly understood. We gathered chronological data on the implementation of NPIs for several European, and other, countries between January and the end of May 2020. We estimate the effectiveness of NPIs, ranging from limiting gathering sizes, business closures, and closure of educational institutions to stay-at-home orders. To do so, we used a Bayesian hierarchical model that links NPI implementation dates to national case and death counts and supported the results with extensive empirical validation. Closing all educational institutions, limiting gatherings to 10 people or less, and closing face-to-face businesses each reduced transmission considerably. The additional effect of stay-at-home orders was comparatively small.
Jan Brauner, Sören Mindermann, Mrinank Sharma, David Johnston, John Salvatier, Tomáš Gavenčiak, Anna B Stephenson, Gavin Leech, George Altman, Vladimir Mikulik, Alexander John Norman, Joshua Teperowski Monrad, Tamay Besiroglu, Hong Ge, Meghan A Hartwick, Yee Whye Teh, Leonid Chindelevitch, Yarin Gal, Jan Kulveit
Science (2020): eabd9338
[Paper]

Global Earth Magnetic Field Modeling andForecasting with Spherical Harmonics Decomposition
Modeling and forecasting the solar wind-driven global magnetic field perturbations is an open challenge. Current approaches depend on simulations of computationally demanding models like the Magnetohydrodynamics (MHD) model or sampling spatially and temporally through sparse ground-based stations (SuperMAG). In this paper, we develop a Deep Learning model that forecasts in Spherical Harmonics space, replacing reliance on MHD models and providing global coverage at oneminute cadence, improving over the current state-of-the-art which relies on feature engineering. We evaluate the performance in SuperMAG dataset (improved by 14.53%) and MHD simulations (improved by 24.35%). Additionally, we evaluate the extrapolation performance of the spherical harmonics reconstruction based on sparse ground-based stations (SuperMAG), showing that spherical harmonics can reliably reconstruct the global magnetic field as evaluated on MHD simulation
Panagiotis Tigas, Téo Bloch, Vishal Upendran, Banafsheh Ferdoushi, Yarin Gal, Siddha Ganju, Ryan M. McGranaghan, Mark C. M. Cheung, Asti Bhatt
Machine Learning and the Physical Sciences Workshop - 34th NeurIPS 2020 [Paper]
Determining new representations of “Geoeffectiveness” using deep learning - AGU 2020

Real2sim: Automatic Generation of Open Street Map Towns For Autonomous Driving Benchmarks
Research in machine learning for autonomous driving (AD) is a constantly evolving field as researchers strive to build a Level 5 autonomous driving system. However, current benchmarks for such learning algorithms do not satisfactorily allow researchers to evaluate and compare performance across safety-critical metrics such as generalizability, out-of-distribution performance, etc. Reasons for this include the expensive nature of data collection from the real-world for autonomous driving and the limitations of software tools currently available for autonomous driving simulators. We develop a pipeline that allows for automatic generation of new town maps for simulator environments from OpenStreetMap [Haklay and Weber, 2008]. We demonstrate that our pipeline is capable of generating towns that, when perceived via LiDAR , share similar footprint to real-world gathered datasets like NuScenes [Caesar et al., 2020]. Additionally, we learn a realistic noise augmentation via Conditional Adv... [full abstract]
Avishek Mondal, Panagiotis Tigas, Yarin Gal
Machine Learning for Autonomous Driving Workshop at the 34th Conference on Neural Information Processing Systems (NeurIPS 2020), Vancouver, Canada. [Paper]
A Bayesian Perspective on Training Speed and Model Selection
We take a Bayesian perspective to illustrate a connection between training speed and the marginal likelihood in linear models. This provides two major insights: first, that a measure of a model's training speed can be used to estimate its marginal likelihood. Second, that this measure, under certain conditions, predicts the relative weighting of models in linear model combinations trained to minimize a regression loss. We verify our results in model selection tasks for linear models and for the infinite-width limit of deep neural networks. We further provide encouraging empirical evidence that the intuition developed in these settings also holds for deep neural networks trained with stochastic gradient descent. Our results suggest a promising new direction towards explaining why neural networks trained with stochastic gradient descent are biased towards functions that generalize well.
Clare Lyle, Lisa Schut, Binxin (Robin) Ru, Yarin Gal, Mark van der Wilk
NeurIPS, 2020
[Paper] [Code] [BibTex]
Liberty or Depth: Deep Bayesian Neural Nets Do Not Need Complex Weight Posterior Approximations
We challenge the longstanding assumption that the mean-field approximation for variational inference in Bayesian neural networks is severely restrictive, and show this is not the case in deep networks. We prove several results indicating that deep mean-field variational weight posteriors can induce similar distributions in function-space to those induced by shallower networks with complex weight posteriors. We validate our theoretical contributions empirically, both through examination of the weight posterior using Hamiltonian Monte Carlo in small models and by comparing diagonal- to structured-covariance in large settings. Since complex variational posteriors are often expensive and cumbersome to implement, our results suggest that using mean-field variational inference in a deeper model is both a practical and theoretically justified alternative to structured approximations.
Sebastian Farquhar, Lewis Smith, Yarin Gal
NeurIPS, 2020
[Paper] [arXiv]

Uncertainty-Aware Counterfactual Explanations for Medical Diagnosis
While deep learning algorithms can excel at predicting outcomes, they often act as black-boxes rendering them uninterpretable for healthcare practitioners. Counterfactual explanations (CEs) are a practical tool for demonstrating why machine learning models make particular decisions. We introduce a novel algorithm that leverages uncertainty to generate trustworthy counterfactual explanations for white-box models. Our proposed method can generate more interpretable CEs than the current benchmark (Van Looveren and Klaise, 2019) for breast cancer diagnosis. Further, our approach provides confidence levels for both the diagnosis as well as the explanation.
Lisa Schut, Oscar Key, Rory McGrath, Luca Costabello, Bogdan Sacaleanu, Medb Corcoran, Yarin Gal
ML4H: Machine Learning for Health Workshop NeurIPS, 2020
[Paper] [BibTex]
On the robustness of effectiveness estimation of nonpharmaceutical interventions against COVID-19 transmission
There remains much uncertainty about the relative effectiveness of different nonpharmaceutical interventions (NPIs) against COVID-19 transmission. Several studies attempt to infer NPI effectiveness with cross-country, data-driven modelling, by linking from NPI implementation dates to the observed timeline of cases and deaths in a country. These models make many assumptions. Previous work sometimes tests the sensitivity to variations in explicit epidemiological model parameters, but rarely analyses the sensitivity to the assumptions that are made by the choice the of model structure (structural sensitivity analysis). Such analysis would ensure that the inferences made are consistent under plausible alternative assumptions. Without it, NPI effectiveness estimates cannot be used to guide policy. We investigate four model structures similar to a recent state-of-the-art Bayesian hierarchical model. We find that the models differ considerably in the robustness of their NPI effectiveness ... [full abstract]
Mrinank Sharma, Sören Mindermann, Jan Brauner, Gavin Leech, Anna B. Stephenson, Tomáš Gavenčiak, Jan Kulveit, Yee Whye Teh, Leonid Chindelevitch, Yarin Gal
NeurIPS, 2020
[Paper]

Scalable Training with Information Bottleneck Objectives
The Information Bottleneck principle offers both a mechanism to explain how deep neural networks train and generalize, as well as a regularized objective with which to train models, with multiple competing objectives proposed in the literature. Moreover, the information-theoretic quantities used in these objectives are difficult to compute for large deep neural networks, often relying on density estimation using generative models. This, in turn, limits their use as a training objective. In this work, we review these quantities, compare and unify previously proposed objectives and relate them to surrogate objectives more friendly to optimization without relying on cumbersome tools such as density estimation. We find that these surrogate objectives allow us to apply the information bottleneck to modern neural network architectures with stochastic latent representations. We demonstrate our insights on MNIST and CIFAR10 with modern neural network architectures..
Andreas Kirsch, Clare Lyle, Yarin Gal
ICML workshop on Uncertainty & Robustness in Deep Learning
[paper]

Identifying Causal Effect Inference Failure with Uncertainty-Aware Models
Recommending the best course of action for an individual is a major application of individual-level causal effect estimation. This application is often needed in safety-critical domains such as healthcare, where estimating and communicating uncertainty to decision-makers is crucial. We introduce a practical approach for integrating uncertainty estimation into a class of state-of-the-art neural network methods used for individual-level causal estimates. We show that our methods enable us to deal gracefully with situations of "no-overlap", common in high-dimensional data, where standard applications of causal effect approaches fail. Further, our methods allow us to handle covariate shift, where test distribution differs to train distribution, common when systems are deployed in practice. We show that when such a covariate shift occurs, correctly modeling uncertainty can keep us from giving overconfident and potentially harmful recommendations. We demonstrate our methodology with a ra... [full abstract]
Andrew Jesson, Sören Mindermann, Uri Shalit, Yarin Gal
NeurIPS, 2020
[arXiv] [BibTex]

Capsule Networks: A Generative Probabilistic Perspective
'Capsule' models try to explicitly represent the poses of objects, enforcing a linear relationship between an objects pose and those of its constituent parts. This modelling assumption should lead to robustness to viewpoint changes since the object-component relationships are invariant to the poses of the object. We describe a probabilistic generative model that encodes these assumptions. Our probabilistic formulation separates the generative assumptions of the model from the inference scheme, which we derive from a variational bound. We experimentally demonstrate the applicability of our unified objective, and the use of test time optimisation to solve problems inherent to amortised inference.
Lewis Smith, Lisa Schut, Yarin Gal, Mark van der Wilk
Object Oriented Learning Workshop, ICML 2020
[Paper]

Principled Uncertainty Estimation for High Dimensional Data
The ability to quantify the uncertainty in the prediction of a Bayesian deep learning model has significant practical implications—from more robust machine-learning based systems to more effective expert-in-the loop processes. While several general measures of model uncertainty exist, they are often intractable in practice when dealing with high dimensional data such as long sequences. Instead, researchers often resort to ad hoc approaches or to introducing independence assumptions to make computation tractable. We introduce a principled approach to estimate uncertainty in high dimensions that circumvents these challenges, and demonstrate its benefits in de novo molecular design.
Pascal Notin, José Miguel Hernández-Lobato, Yarin Gal
Uncertainty & Robustness in Deep Learning Workshop, ICML, 2020
[Paper]

SliceOut: Training Transformers and CNNs faster while using less memory
We demonstrate 10-40% speedups and memory reduction with Wide ResNets, EfficientNets, and Transformer models, with minimal to no loss in accuracy, using SliceOut---a new dropout scheme designed to take advantage of GPU memory layout. By dropping contiguous sets of units at random, our method preserves the regularization properties of dropout while allowing for more efficient low-level implementation, resulting in training speedups through (1) fast memory access and matrix multiplication of smaller tensors, and (2) memory savings by avoiding allocating memory to zero units in weight gradients and activations. Despite its simplicity, our method is highly effective. We demonstrate its efficacy at scale with Wide ResNets & EfficientNets on CIFAR10/100 and ImageNet, as well as Transformers on the LM1B dataset. These speedups and memory savings in training can lead to CO2 emissions reduction of up to 40% for training large models.
Pascal Notin, Aidan Gomez, Joanna Yoo, Yarin Gal
Under review
[Paper]

Single Shot Structured Pruning Before Training
We introduce a method to speed up training by 2x and inference by 3x in deep neural networks using structured pruning applied before training. Unlike previous works on pruning before training which prune individual weights, our work develops a methodology to remove entire channels and hidden units with the explicit aim of speeding up training and inference. We introduce a compute-aware scoring mechanism which enables pruning in units of sensitivity per FLOP removed, allowing even greater speed ups. Our method is fast, easy to implement, and needs just one forward/backward pass on a single batch of data to complete pruning before training begins.
Joost van Amersfoort, Milad Alizadeh, Sebastian Farquhar, Nicholas Lane, Yarin Gal
arXiv
[paper]

Unpacking Information Bottlenecks: Unifying Information-Theoretic Objectives in Deep Learning
The Information Bottleneck principle offers both a mechanism to explain how deep neural networks train and generalize, as well as a regularized objective with which to train models. However, multiple competing objectives are proposed in the literature, and the information-theoretic quantities used in these objectives are difficult to compute for large deep neural networks, which in turn limits their use as a training objective. In this work, we review these quantities and compare and unify previously proposed objectives, which allows us to develop surrogate objectives more friendly to optimization without relying on cumbersome tools such as density estimation. We find that these surrogate objectives allow us to apply the information bottleneck to modern neural network architectures. We demonstrate our insights on MNIST, CIFAR-10 and Imagenette with modern DNN architectures (ResNets).
Andreas Kirsch, Clare Lyle, Yarin Gal
Uncertainty & Robustness in Deep Learning Workshop, ICML, 2020
[Paper] [BibTex] [Poster]

Learning CIFAR-10 with a Simple Entropy Estimator Using Information Bottleneck Objectives
The Information Bottleneck (IB) principle characterizes learning and generalization in deep neural networks in terms of the change in two information theoretic quantities and leads to a regularized objective function for training neural networks. These quantities are difficult to compute directly for deep neural networks. We show that it is possible to backpropagate through a simple entropy estimator to obtain an IB training method that works for modern neural network architectures. We evaluate our approach empirically on the CIFAR-10 dataset, showing that IB objectives can yield competitive performance on this dataset with a conceptually simple approach while also performing well against adversarial attacks out-of-the-box.
Andreas Kirsch, Clare Lyle, Yarin Gal
Uncertainty & Robustness in Deep Learning Workshop, ICML, 2020
[Paper] [BibTex]

Invariant Causal Prediction for Block MDPs
Generalization across environments is critical to the successful application of reinforcement learning algorithms to real-world challenges. In this paper, we consider the problem of learning abstractions that generalize in block MDPs, families of environments with a shared latent state space and dynamics structure over that latent space, but varying observations. We leverage tools from causal inference to propose a method of invariant prediction to learn model-irrelevance state abstractions (MISA) that generalize to novel observations in the multi-environment setting. We prove that for certain classes of environments, this approach outputs with high probability a state abstraction corresponding to the causal feature set with respect to the return. We further provide more general bounds on model error and generalization error in the multi-environment setting, in the process showing a connection between causal variable selection and the state abstraction framework for MDPs. We give e... [full abstract]
Amy Zhang, Clare Lyle, Shagun Sodhani, Angelos Filos, Marta Kwiatkowska, Joelle Pineau, Yarin Gal, Doina Precup
Causal Learning for Decision Making Workshop at ICLR, 2020
[Paper]
ICML, 2020
[Paper]

Uncertainty Estimation Using a Single Deep Deterministic Neural Network
We propose a method for training a deterministic deep model that can find and reject out of distribution data points at test time with a single forward pass. Our approach, deterministic uncertainty quantification (DUQ), builds upon ideas of RBF networks. We scale training in these with a novel loss function and centroid updating scheme and match the accuracy of softmax models. By enforcing detectability of changes in the input using a gradient penalty, we are able to reliably detect out of distribution data. Our uncertainty quantification scales well to large datasets, and using a single model, we improve upon or match Deep Ensembles in out of distribution detection on notable difficult dataset pairs such as FashionMNIST vs. MNIST, and CIFAR-10 vs. SVHN.
Joost van Amersfoort, Lewis Smith, Yee Whye Teh, Yarin Gal
ICML, 2020
[Paper] [BibTex]

Inter-domain Deep Gaussian Processes
Inter-domain Gaussian processes (GPs) allow for high flexibility and low computational cost when performing approximate inference in GP models. They are particularly suitable for modeling data exhibiting global structure but are limited to stationary covariance functions and thus fail to model non-stationary data effectively. We propose Inter-domain Deep Gaussian Processes, an extension of inter-domain shallow GPs that combines the advantages of inter-domain and deep Gaussian processes (DGPs), and demonstrate how to leverage existing approximate inference methods to perform simple and scalable approximate inference using inter-domain features in DGPs. We assess the performance of our method on a range of regression tasks and demonstrate that it outperforms inter-domain shallow GPs and conventional DGPs on challenging large-scale real-world datasets exhibiting both global structure as well as a high-degree of non-stationarity.
Tim G. J. Rudner, Dino Sejdinovic, Yarin Gal
ICML, 2020
[arXiv] [Website] [Talk] [Slides] [BibTex]

Can Autonomous Vehicles Identify, Recover From, and Adapt to Distribution Shifts?
Out-of-training-distribution (OOD) scenarios are a common challenge of learning agents at deployment, typically leading to arbitrary deductions and poorly-informed decisions. In principle, detection of and adaptation to OOD scenes can mitigate their adverse effects. In this paper, we highlight the limitations of current approaches to novel driving scenes and propose an epistemic uncertainty-aware planning method, called _robust imitative planning_ (RIP). Our method can detect and recover from some distribution shifts, reducing the overconfident and catastrophic extrapolations in OOD scenes. If the model's uncertainty is too great to suggest a safe course of action, the model can instead query the expert driver for feedback, enabling sample-efficient online adaptation, a variant of our method we term _adaptive robust imitative planning_ (AdaRIP). Our methods outperform current state-of-the-art approaches in the nuScenes _prediction_ challenge, but since no benchmark evaluating OOD d... [full abstract]
Angelos Filos, Panagiotis Tigas, Rowan McAllister, Nicholas Rhinehart, Sergey Levine, Yarin Gal
ICML, 2020
[Paper] [Code] [Website]
Model And Data Uncertainty For Satellite Time Series Forecasting With Deep Recurrent Models
Deep Learning is often criticized as black-box method which often provides accurate predictions, but limited explanation of the underlying processes and no indication when to not trust those predictions. Equipping existing deep learning models with an (approximate) notion of uncertainty can help mitigate both these issues therefore their use should be known more broadly in the community. The Bayesian deep learning community has developed model-agnostic and easyto-implement methodology to estimate both data and model uncertainty within deep learning models which is hardly applied in the remote sensing community. In this work, we adopt this methodology for deep recurrent satellite time series forecasting, and test its assumptions on data and model uncertainty. We demonstrate its effectiveness on two applications on climate change, and event change detection and outline limitations.
Marc Rußwurm, Syed Mohsin Ali, Xiao Xiang Zhu, Yarin Gal, Marco Körner
Student Paper Competition Finalists (out of 250 submissions), IGARSS 2020
[Paper]
Uncertainty Evaluation Metric for Brain Tumour Segmentation
In this paper, we develop a metric designed to assess and rank uncertainty measures for the task of brain tumour sub-tissue segmentation in the BraTS 2019 sub-challenge on uncertainty quantification. The metric is designed to: (1) reward uncertainty measures where high confidence is assigned to correct assertions, and where incorrect assertions are assigned low confidence and (2) penalize measures that have higher percentages of under-confident correct assertions. Here, the workings of the components of the metric are explored based on a number of popular uncertainty measures evaluated on the BraTS 2019 dataset.
Raghav Mehta, Angelos Filos, Yarin Gal, Tal Arbel
MIDL, 2020
[Paper]

Uncertainty Quantification with Statistical Guarantees in End-to-End Autonomous Driving Control
Deep neural network controllers for autonomous driving have recently benefited from significant performance improvements, and have begun deployment in the real world. Prior to their widespread adoption, safety guarantees are needed on the controller behaviour that properly take account of the uncertainty within the model as well as sensor noise. Bayesian neural networks, which assume a prior over the weights, have been shown capable of producing such uncertainty measures, but properties surrounding their safety have not yet been quantified for use in autonomous driving scenarios. In this paper, we develop a framework based on a state-of-the-art simulator for evaluating end-to-end Bayesian controllers. In addition to computing pointwise uncertainty measures that can be computed in real time and with statistical guarantees, we also provide a method for estimating the probability that, given a scenario, the controller keeps the car safe within a finite horizon. We experimentally evalu... [full abstract]
Rhiannon Michelmore, Matthew Wicker, Luca Laurenti, Luca Cardelli, Yarin Gal, Marta Kwiatkowska
2020 International Conference on Robotics and Automation (ICRA)
[arXiv]

Try Depth Instead of Weight Correlations: Mean-field is a Less Restrictive Assumption for Deeper Networks
We challenge the longstanding assumption that the mean-field approximation for variational inference in Bayesian neural networks is severely restrictive. We argue mathematically that full-covariance approximations only improve the ELBO if they improve the expected log-likelihood. We further show that deeper mean-field networks are able to express predictive distributions approximately equivalent to shallower full-covariance networks. We validate these observations empirically, demonstrating that deeper models decrease the divergence between diagonal- and full-covariance Gaussian fits to the true posterior.
Sebastian Farquhar, Lewis Smith, Yarin Gal
Contributed talk, Workshop on Bayesian Deep Learning, NeurIPS 2019
[Workshop paper], [arXiv]
Radial Bayesian Neural Networks: Beyond Discrete Support In Large-Scale Bayesian Deep Learning
We propose Radial Bayesian Neural Networks (BNNs): a variational approximate posterior for BNNs which scales well to large models while maintaining a distribution over weight-space with full support. Other scalable Bayesian deep learning methods, like MC dropout or deep ensembles, have discrete support---they assign zero probability to almost all of the weight-space. Unlike these discrete support methods, Radial BNNs' full support makes them suitable for use as a prior for sequential inference. In addition, they solve the conceptual challenges with the a priori implausibility of weight distributions with discrete support. The Radial BNN is motivated by avoiding a sampling problem in 'mean-field' variational inference (MFVI) caused by the so-called 'soap-bubble' pathology of multivariate Gaussians. We show that, unlike MFVI, Radial BNNs are robust to hyperparameters and can be efficiently applied to a challenging real-world medical application without needing ad-hoc tweaks and inten... [full abstract]
Sebastian Farquhar, Michael Osborne, Yarin Gal
The 23rd International Conference on Artificial Intelligence and Statistics (AISTATS)
[arXiv]
VariBAD: A Very Good Method for Bayes-Adaptive Deep RL via Meta-Learning
Trading off exploration and exploitation in an unknown environment is key to maximising expected return during learning. A Bayes-optimal policy, which does so optimally, conditions its actions not only on the environment state but on the agent's uncertainty about the environment. Computing a Bayes-optimal policy is however intractable for all but the smallest tasks. In this paper, we introduce variational Bayes-Adaptive Deep RL (variBAD), a way to meta-learn to perform approximate inference in an unknown environment, and incorporate task uncertainty directly during action selection. In a grid-world domain, we illustrate how variBAD performs structured online exploration as a function of task uncertainty. We also evaluate variBAD on MuJoCo domains widely used in meta-RL and show that it achieves higher return during training than existing methods.
Luisa Zintgraf, Kyriacos Shiarlis, Maximilian Igl, Sebastian Schulze, Yarin Gal, Katja Hofmann, Shimon Whiteson
ICLR, 2020
[OpenReview]
BayesOpt Adversarial Attack
Black-box adversarial attacks require a large number of attempts before finding successful adversarial examples that are visually indistinguishable from the original input. Current approaches relying on substitute model training, gradient estimation or genetic algorithms often require an excessive number of queries. Therefore, they are not suitable for real-world systems where the maximum query number is limited due to cost. We propose a query-efficient black-box attack which uses Bayesian optimisation in combination with Bayesian model selection to optimise over the adversarial perturbation and the optimal degree of search space dimension reduction. We demonstrate empirically that our method can achieve comparable success rates with 2-5 times fewer queries compared to previous state-of-the-art black-box attacks.
Binxin (Robin) Ru, Adam Cobb, Arno Blaas, Yarin Gal
ICLR, 2020
[OpenReview]
Using U-Nets to Create High-Fidelity Virtual Observations of the Solar Corona
Understanding and monitoring the complex and dynamic processes of the Sun is important for a number of human activities on Earth and in space. For this reason, NASA's Solar Dynamics Observatory (SDO) has been continuously monitoring the multi-layered Sun's atmosphere in high-resolution since its launch in 2010, generating terabytes of observational data every day. The synergy between machine learning and this enormous amount of data has the potential, still largely unexploited, to advance our understanding of the Sun and extend the capabilities of heliophysics missions. In the present work, we show that deep learning applied to SDO data can be successfully used to create a high-fidelity virtual telescope that generates synthetic observations of the solar corona by image translation. Towards this end we developed a deep neural network, structured as an encoder-decoder with skip connections (U-Net), that reconstructs the Sun's image of one instrument channel given temporally aligned ... [full abstract]
Valentina Salvatelli, Souvik Bose, Brad Neuberg, Luiz F. G. dos Santos, Mark Cheung, Miho Janvier, Atılım Güneş Baydin, Yarin Gal, Meng Jin
Machine Learning and the Physical Sciences Workshop (ML4PS), NeurIPS 2019
[arXiv]
Auto-Calibration of Remote Sensing Solar Telescopes with Deep Learning
As a part of NASA's Heliophysics System Observatory (HSO) fleet of satellites,the Solar Dynamics Observatory (SDO) has continuously monitored the Sun since2010. Ultraviolet (UV) and Extreme UV (EUV) instruments in orbit, such asSDO's Atmospheric Imaging Assembly (AIA) instrument, suffer time-dependent degradation which reduces instrument sensitivity. Accurate calibration for (E)UV instruments currently depends on periodic sounding rockets, which are infrequent and not practical for heliophysics missions in deep space. In the present work, we develop a Convolutional Neural Network (CNN) that auto-calibrates SDO/AIA channels and corrects sensitivity degradation by exploiting spatial patterns in multi-wavelength observations to arrive at a self-calibration of (E)UV imaging instruments. Our results remove a major impediment to developing future HSOmissions of the same scientific caliber as SDO but in deep space, able to observe the Sun from more vantage points than just SDO's current g... [full abstract]
Brad Neuberg, Souvik Bose, Valentina Salvatelli, Luiz F.G. dos Santos, Mark Cheung, Miho Janvier, Atılım Güneş Baydin, Yarin Gal, Meng Jin
Machine Learning and the Physical Sciences Workshop (ML4PS), NeurIPS 2019
[arXiv]
PAC-Bayes Generalization Bounds for Invariant Neural Networks
Invariance is widely described as a desirable property of neural networks, but the mechanisms by which it benefits deep learning remain shrouded in mystery. We show that building invariance into model architecture via feature averaging provably tightens PAC-Bayes generalization bounds, as compared to data augmentation. Furthermore, through a link to the marginal likelihood and Bayesian model selection, we provide justification for using the improvement in these bounds for model selection. Our key observation is that invariance doesn't just reduce variance in deep learning: it also changes the parameter-function mapping, and this leads better provable guarantees for the model. We verify our theoretical results empirically on a permutation-invariant dataset.
Clare Lyle, Marta Kwiatkowska, Yarin Gal
14th Women in Machine Learning Workshop (WiML 2019)
[WiML]
Prediction of GNSS Phase Scintillations: A Machine Learning Approach
A Global Navigation Satellite System (GNSS) uses a constellation of satellites around the earth for accurate navigation, timing, and positioning. Natural phenomena like space weather introduce irregularities in the Earth's ionosphere, disrupting the propagation of the radio signals that GNSS relies upon. Such disruptions affect both the amplitude and the phase of the propagated waves. No physics-based model currently exists to predict the time and location of these disruptions with sufficient accuracy and at relevant scales. In this paper, we focus on predicting the phase fluctuations of GNSS radio waves, known as phase scintillations. We propose a novel architecture and loss function to predict 1 hour in advance the magnitude of phase scintillations within a time window of plus-minus 5 minutes with state-of-the-art performance.
Kara Lamb, Garima Malhotra, Athanasios Vlontzos, Edward Wagstaff, Atılım Güneş Baydin, Anahita Bhiwandiwalla, Yarin Gal, Freddie Kalaitzis, Anthony Reina, Asti Bhatt
Machine Learning and the Physical Sciences Workshop (ML4PS), NeurIPS 2019
[arXiv]
Correlation of Auroral Dynamics and GNSS Scintillation with an Autoencoder
High energy particles originating from solar activity travel along the the Earth's magnetic field and interact with the atmosphere around the higher latitudes. These interactions often manifest as aurora in the form of visible light in the Earth's ionosphere. These interactions also result in irregularities in the electron density, which cause disruptions in the amplitude and phase of the radio signals from the Global Navigation Satellite Systems (GNSS), known as 'scintillation'. In this paper we use a multi-scale residual autoencoder (Res-AE) to show the correlation between specific dynamic structures of the aurora and the magnitude of the GNSS phase scintillations (σϕ). Auroral images are encoded in a lower dimensional feature space using the Res-AE, which in turn are clustered with t-SNE and UMAP. Both methods produce similar clusters, and specific clusters demonstrate greater correlations with observed phase scintillations. Our results suggest that specific dynamic structures o... [full abstract]
Kara Lamb, Garima Malhotra, Athanasios Vlontzos, Edward Wagstaff, Atılım Güneş Baydin, Anahita Bhiwandiwalla, Yarin Gal, Freddie Kalaitzis, Anthony Reina, Asti Bhatt
Machine Learning and the Physical Sciences Workshop (ML4PS), NeurIPS 2019
[arXiv]
Single-Frame Super-Resolution of Solar Magnetograms; Investigating Physics-Based Metrics & Losses
Breakthroughs in our understanding of physical phenomena have traditionally followed improvements in instrumentation. Studies of the magnetic field of the Sun, and its influence on the solar dynamo and space weather events, have benefited from improvements in resolution and measurement frequency of new instruments. However, in order to fully understand the solar cycle, high-quality data across time-scales longer than the typical lifespan of a solar instrument are required. At the moment, discrepancies between measurement surveys prevent the combined use of all available data. In this work, we show that machine learning can help bridge the gap between measurement surveys by learning to super-resolve low-resolution magnetic field images and translate between characteristics of contemporary instruments in orbit. We also introduce the notion of physics-based metrics and losses for super-resolution to preserve underlying physics and constrain the solution space of possible super-resolut... [full abstract]
Anna Jungbluth, Xavier Gitiaux, Shane A.Maloney, Carl Shneider, Paul J. Wright, Freddie Kalaitzis, Michel Deudon, Atılım Güneş Baydin, Yarin Gal, Andrés Muñoz-Jaramillo
Machine Learning and the Physical Sciences Workshop (ML4PS), NeurIPS 2019
[arXiv]
Wat heb je gezegd? Detecting Out-of-Distribution Translations with Variational Transformers
We use epistemic uncertainty to detect out-of-training-distribution sentences in Neural Machine Translation. For this, we develop a measure of uncertainty designed specifically for long sequences of discrete random variables, corresponding to the words in the output sentence. This measure is able to convey epistemic uncertainty akin to the Mutual Information (MI), which is used in the case of single discrete random variables such as in classification. Our new measure of uncertainty solves a major intractability in the naive application of existing approaches on long sentences. We train a Transformer model with dropout on the task of GermanEnglish translation using WMT 13 and Europarl, and show that using dropout uncertainty our measure is able to identify when Dutch source sentences, sentences which use the same word types as German, are given to the model instead of German.
Tim Xiao, Aidan Gomez, Yarin Gal
Spotlight talk, Workshop on Bayesian Deep Learning, NeurIPS 2019
[Paper]
Adversarial recovery of agent rewards from latent spaces of the limit order book
Inverse reinforcement learning has proved its ability to explain state-action trajectories of expert agents by recovering their underlying reward functions in increasingly challenging environments. Recent advances in adversarial learning have allowed extending inverse RL to applications with non-stationary environment dynamics unknown to the agents, arbitrary structures of reward functions and improved handling of the ambiguities inherent to the ill-posed nature of inverse RL. This is particularly relevant in real time applications on stochastic environments involving risk, like volatile financial markets. Moreover, recent work on simulation of complex environments enable learning algorithms to engage with real market data through simulations of its latent space representations, avoiding a costly exploration of the original environment. In this paper, we explore whether adversarial inverse RL algorithms can be adapted and trained within such latent space simulations from real marke... [full abstract]
Jacobo Roa Vicens, Yuanbo Wang, Virgile Mison, Yarin Gal, Ricardo Silva
NeurIPS 2019 Workshop on Robust AI in Financial Services: Data, Fairness, Explainability, Trustworthiness, and Privacy
[Paper]
Flood Detection On Low Cost Orbital Hardware
Satellite imaging is a critical technology for monitoring and responding to natural disasters such as flooding. Despite the capabilities of modern satellites, there is still much to be desired from the perspective of first response organisations like UNICEF. Two main challenges are rapid access to data, and the ability to automatically identify flooded regions in images. We describe a prototypical flood segmentation system, identifying cloud, water and land, that could be deployed on a constellation of small satellites, performing processing on board to reduce downlink bandwidth by 2 orders of magnitude. We target PhiSat-1, part of the FSSCAT mission, which is planned to be launched by the European Space Agency (ESA) near the start of 2020 as a proof of concept for this new technology.
Joshua Veitch-Michaelis, Gonzalo Mateo-Garcia, Silviu Oprea, Lewis Smith, Atılım Güneş Baydin, Dietmar Backes, Yarin Gal, Guy Schumann
Spotlight talk, Artificial Intelligence for Humanitarian Assistance and Disaster Response (AI+HADR) NeurIPS 2019 Workshop
[arXiv]
Robust Imitative Planning: Planning from Demonstrations Under Uncertainty
Learning from expert demonstrations is an attractive framework for sequential decision-making in safety-critical domains such as autonomous driving, where trial and error learning has no safety guarantees during training. However, naïve use of imitation learning can fail by extrapolating incorrectly to unfamiliar situations, resulting in arbitrary model outputs and dangerous outcomes. This is especially true for high capacity parametric models such as deep neural networks, for processing high-dimensional observations from cameras or LIDAR. Instead, we model expert behaviour with a model able to capture uncertainty about previously unseen scenarios, as well as inherent stochasticity in expert demonstrations. We propose a framework for planning under epistemic uncertainty and also provide a practical realisation, called robust imitative planning (RIP), using an ensemble of deep neural density estimators. We demonstrate online robustness to out-of-training distribution scenarios on th... [full abstract]
Panagiotis Tigas, Angelos Filos, Rowan McAllister, Nicholas Rhinehart, Sergey Levine, Yarin Gal
NeurIPS2019 Workshop on Machine Learning for Autonomous Driving
[Paper]
FDL: Mission Support Challenge
The Frontier Development Lab (FDL) is a National Aeronautics and Space Administration (NASA) machine learning program with the stated aim of conducting artificial intelligence research for space exploration and all humankind with support in the European program from the European Space Agency (ESA). Interdisciplinary teams of researchers and data-scientists are brought together to tackle a range of challenging, real-world problems in the space-domain. The program primarily consists of a sprint phase during which teams tackle separate problems in the spirit of 'coopetition'. Teams are given a problem brief by real stakeholders and mentored by a range of experts. With access to exceptional computational resources, we were challenged to make a serious contribution within just eight weeks. Stated simply, our team was tasked with producing a system capable of scheduling downloads from satellites autonomously. Scheduling is a difficult problem in general, of course, complicated further i... [full abstract]
Luís F. Simões, Ben Day, Vinutha M. Shreenath, Callum Wilson, Chris Bridges, Sylvester Kaczmarek, Yarin Gal
NeurIPS 2019 Workshop on Machine Learning Competitions for All
[arXiv]
Machine Learning for Generalizable Prediction of Flood Susceptibility
Flooding is a destructive and dangerous hazard and climate change appears to be increasing the frequency of catastrophic flooding events around the world. Physics-based flood models are costly to calibrate and are rarely generalizable across different river basins, as model outputs are sensitive to site-specific parameters and human-regulated infrastructure. In contrast, statistical models implicitly account for such factors through the data on which they are trained. Such models trained primarily from remotely-sensed Earth observation data could reduce the need for extensive in-situ measurements. In this work, we develop generalizable, multi-basin models of river flooding susceptibility using geographically-distributed data from the USGS stream gauge network. Machine learning models are trained in a supervised framework to predict two measures of flood susceptibility from a mix of river basin attributes, impervious surface cover information derived from satellite imagery, and hist... [full abstract]
Chelsea Sidrane, Dylan J Fitzpatrick, Andrew Annex, Diane O’Donoghue, Piotr Bilinksi, Yarin Gal
Spotlight talk, Artificial Intelligence for Humanitarian Assistance and Disaster Response (AI+HADR) NeurIPS 2019 Workshop
[arXiv]

Location Conditional Image Generation using Generative Adversarial Networks
Can an AI-artist instil the emotion of sense of place in its audience? Motivated by this thought, this paper presents our endeavours to make a GANs model learn the visual characteristics of locations to achieve creativity. The project’s novelty lies in addressing the problem of the hardness of GANs training for an extremely diverse dataset in a contextual setting. The project explores GANs as an impressionist artist who adds its perspective to the artwork without hampering photo realism.
Mayur Saxena, Aidan Gomez, Yarin Gal
Machine Learning for Creativity and Design NeurIPS 2019 Workshop
[Paper]
The Natural Neural Tangent Kernel: Neural Network Training Dynamics under Natural Gradient Descent
Gradient-based optimization methods have proven successful in learning complex, overparameterized neural networks from non-convex objectives. Yet, the precise theoretical relationship between gradient-based optimization methods, the resulting training dynamics, and generalization in deep neural networks (DNNs) remains unclear. In this work, we investigate the training dynamics of overparameterized DNNs of \emph{finite-width} under natural gradient descent. To do so, we take a function-space view of the training dynamics under natural gradient descent and derive a bound on the discrepancy between the DNN predictive distributions induced by linearized and non-linearized natural gradient descent. Unlike prior work, our bound quantifies the extent to which linearization of the training dynamics of finite-width DNNs affects DNN predictions on arbitrary test points.
Tim G. J. Rudner, Florian Wenzel, Yee Whye Teh, Yarin Gal
Contributed talk, NeurIPS Workshop on Bayesian Deep Learning, 2019
[Preprint]
Improving MFVI in Bayesian Neural Networks with Empirical Bayes: a Study with Diabetic Retinopathy Diagnosis
Specifying meaningful weight priors for variational inference in Bayesian deep neural network (DNN) is a challenging problem, particularly for scaling to larger models involving high dimensional weight space. We evaluate the recently proposed, MOdel Priors with Empirical Bayes using DNN (MOPED) method for Bayesian DNNs within the Bayesian Deep Learning (BDL) benchmarking framework. MOPED enables scalable VI in large models by providing a way to choose informed prior and approximate posterior distributions for Bayesian neural network weights using Empirical Bayes framework. We benchmark MOPED with mean field variational inference on a real-world diabetic retinopathy diagnosis task and compare with state-of-the-art BDL techniques. We demonstrate MOPED method provides reliable uncertainty estimates while outperforming state-of-the-art methods, offering a new strong baseline for the BDL community to compare on complex real-world tasks involving larger models.
Ranganath Krishnan, Mahesh Subedar, Omesh Tickoo, Angelos Filos, Yarin Gal
Workshop on Bayesian Deep Learning, NeurIPS 2019
[Paper]
Probabilistic Super-Resolution of Solar Magnetograms: Generating Many Explanations and Measuring Uncertainties
Machine learning techniques have been successfully applied to super-resolution tasks on natural images where visually pleasing results are sufficient. However in many scientific domains this is not adequate and estimations of errors and uncertainties are crucial. To address this issue we propose a Bayesian framework that decomposes uncertainties into epistemic and aleatoric uncertainties. We test the validity of our approach by super-resolving images of the Sun’s magnetic field and by generating maps measuring the range of possible high resolution explanations compatible with a given low resolution magnetogram.
Xavier Gitiaux, Shane Maloney, Anna Jungbluth, Carl Shneider, Atılım Güneş Baydin, Paul J. Wright, Yarin Gal, Michel Deudon, Freddie Kalaitzis, Andres Munoz-Jaramillo
Workshop on Bayesian Deep Learning, NeurIPS 2019
[Paper]

A Systematic Comparison of Bayesian Deep Learning Robustness in Diabetic Retinopathy Tasks
Evaluation of Bayesian deep learning (BDL) methods is challenging. We often seek to evaluate the methods' robustness and scalability, assessing whether new tools give 'better' uncertainty estimates than old ones. These evaluations are paramount for practitioners when choosing BDL tools on-top of which they build their applications. Current popular evaluations of BDL methods, such as the UCI experiments, are lacking: Methods that excel with these experiments often fail when used in application such as medical or automotive, suggesting a pertinent need for new benchmarks in the field. We propose a new BDL benchmark with a diverse set of tasks, inspired by a real-world medical imaging application on diabetic retinopathy diagnosis. Visual inputs (512x512 RGB images of retinas) are considered, where model uncertainty is used for medical pre-screening---i.e. to refer patients to an expert when model diagnosis is uncertain. Methods are then ranked according to metrics derived from expert-... [full abstract]
Angelos Filos, Sebastian Farquhar, Aidan Gomez, Tim G. J. Rudner, Zac Kenton, Lewis Smith, Milad Alizadeh, Arnoud de Kroon, Yarin Gal
Spotlight talk, NeurIPS Workshop on Bayesian Deep Learning, 2019
[Preprint] [Code] [BibTex]

BatchBALD: Efficient and Diverse Batch Acquisition for Deep Bayesian Active Learning
We develop BatchBALD, a tractable approximation to the mutual information between a batch of points and model parameters, which we use as an acquisition function to select multiple informative points jointly for the task of deep Bayesian active learning. BatchBALD is a greedy linear-time 1−1/e-approximate algorithm amenable to dynamic programming and efficient caching. We compare BatchBALD to the commonly used approach for batch data acquisition and find that the current approach acquires similar and redundant points, sometimes performing worse than randomly acquiring data. We finish by showing that, using BatchBALD to consider dependencies within an acquisition batch, we achieve new state of the art performance on standard benchmarks, providing substantial data efficiency improvements in batch acquisition.
Andreas Kirsch, Joost van Amersfoort, Yarin Gal
NeurIPS, 2019
[arXiv] [BibTex]
An Analysis of the Effect of Invariance on Generalization in Neural Networks
Invariance is often cited as a desirable property of machine learning systems, claimed to improve model accuracy and reduce overfitting. Empirically, invariant models often generalize better than their non-invariant counterparts. But is it possible to show that invariant models provably do so? In this paper we explore the effect of invariance on model generalization. We find strong Bayesian and frequentist motivations for enforcing invariance which leverage recent results connecting PAC-Bayes generalization bounds and the marginal likelihood. We make use of these results to perform model selection on neural networks.
Clare Lyle, Marta Kwiatkowska, Mark van der Wilk, Yarin Gal
Understanding and Improving Generalization in Deep Learning workshop, ICML, 2019
[Paper]
Galaxy Zoo: Probabilistic Morphology through Bayesian CNNs and Active Learning
We use Bayesian CNNs and a novel generative model of Galaxy Zoo volunteer responses to infer posteriors for the visual morphology of galaxies. Bayesian CNN can learn from galaxy images with uncertain labels and then, for previously unlabelled galaxies, predict the probability of each possible label. Using our posteriors, we apply the active learning strategy BALD to request volunteer responses for the subset of galaxies which, if labelled, would be most informative for training our network. By combining human and machine intelligence, Galaxy Zoo will be able to classify surveys of any conceivable scale on a timescale of weeks, providing massive and detailed morphology catalogues to support research into galaxy evolution.
Mike Walmsley, Lewis Smith, Chris Lintott, Yarin Gal, Steven Bamford, Hugh Dickinson, Lucy Fortson, Sandor Kruk, Karen Masters, Claudia Scarlata, Brooke Simmons, Rebecca Smethurst, Darryl Wright
Monthly Notices of the Royal Astronomical Society, 2019
[Paper] [arXiv]

An Ensemble of Bayesian Neural Networks for Exoplanetary Atmospheric Retrieval
Recent work demonstrated the potential of using machine learning algorithms for atmospheric retrieval by implementing a random forest to perform retrievals in seconds that are consistent with the traditional, computationally-expensive nested-sampling retrieval method. We expand upon their approach by presenting a new machine learning model, exttt{plan-net}, based on an ensemble of Bayesian neural networks that yields more accurate inferences than the random forest for the same data set of synthetic transmission spectra.
Adam D. Cobb, Michael D. Himes, Frank Soboczenski, Simone Zorzan, Molly D. O'Beirne, Atılım Güneş Baydin, Yarin Gal, Shawn D. Domagal-Goldman, Giada N. Arney, Daniel Angerhausen
The Astronomical Journal, 2019
[Paper] [arXiv] [Code]

Towards Inverse Reinforcement Learning for Limit Order Book Dynamics
We investigate whether Inverse Reinforcement Learning (IRL) can infer rewards from agents within real financial stochastic environments: limit order books (LOB). Our results illustrate that complex behaviours, induced by non-linear reward functions amid agent-based stochastic scenarios, can be deduced through inference, encouraging the use of inverse reinforcement learning for opponent-modelling in multi-agent systems.
Jacobo Roa-Vicens, Cyrine Chtourou, Angelos Filos, Francisco Rullan, Yarin Gal, Ricardo Silva
Oral Presentation, Multi-Agent Learning Workshop at the 36th International Conference on Machine Learning, 2019
[arXiv] [BibTex]

Generalizing from a few environments in safety-critical reinforcement learning
Before deploying autonomous agents in the real world, we need to be confident they will perform safely in novel situations. Ideally, we would expose agents to a very wide range of situations during training (e.g. many simulated environments), allowing them to learn about every possible danger. But this is often impractical: simulations may fail to capture the full range of situations and may differ subtly from reality. This paper investigates generalizing from a limited number of training environments in deep reinforcement learning. Our experiments test whether agents can perform safely in novel environments, given varying numbers of environments at train time. Using a gridworld setting, we find that standard deep RL agents do not reliably avoid catastrophes on unseen environments – even after performing near optimally on 1000 training environments. However, we show that catastrophes can be significantly reduced (but not eliminated) with simple modifications, including Q-network en... [full abstract]
Zac Kenton, Angelos Filos, Owain Evans, Yarin Gal
ICLR 2019 Workshop on Safe Machine Learning
[paper]
Bayesian Deep Learning for Exoplanet Atmospheric Retrieval
An ML-based retrieval framework called Intelligent exoplaNet Atmospheric RetrievAl (INARA) that consists of a Bayesian deep learning model for retrieval and a data set of 3,000,000 synthetic rocky exoplanetary spectra generated using the NASA Planetary Spectrum Generator.
Frank Soboczenski, Michael D. Himes, Molly D. O'Beirne, Simone Zorzan, Atılım Güneş Baydin, Adam D. Cobb, Yarin Gal, Daniel Angerhausen, Massimo Mascaro, Giada N. Arney, Shawn D. Domagal-Goldman
Workshop on Bayesian Deep Learning, NeurIPS 2018
[arXiv]

On the Connection between Neural Processes and Gaussian Processes with Deep Kernels
Neural Processes (NPs) are a class of neural latent variable models that combine desirable properties of Gaussian Processes (GPs) and neural networks. Like GPs, NPs define distributions over functions and are able to estimate the uncertainty in their predictions. Like neural networks, NPs are computationally efficient during training and prediction time. We establish a simple and explicit connection between NPs and GPs. In particular, we show that, under certain conditions, NPs are mathematically equivalent to GPs with deep kernels. This result further elucidates the relationship between GPs and NPs and makes previously derived theoretical insights about GPs applicable to NPs. Furthermore, it suggests a novel approach to learning expressive GP covariance functions applicable across different prediction tasks by training a deep kernel GP on a set of datasets
Tim G. J. Rudner, Vincent Fortuin, Yee Whye Teh, Yarin Gal
NeurIPS Workshop on Bayesian Deep Learning, 2018
[Paper] [BibTex]
On the Importance of Strong Baselines in Bayesian Deep Learning
Like all sub-fields of machine learning, Bayesian Deep Learning is driven by empirical validation of its theoretical proposals. Given the many aspects of an experiment, it is always possible that minor or even major experimental flaws can slip by both authors and reviewers. One of the most popular experiments used to evaluate approximate inference techniques is the regression experiment on UCI datasets. However, in this experiment, models which have been trained to convergence have often been compared with baselines trained only for a fixed number of iterations. What we find is that if we take a well-established baseline and evaluate it under the same experimental settings, it shows significant improvements in performance. In fact, it outperforms or performs competitively with numerous to several methods that when they were introduced claimed to be superior to the very same baseline method. Hence, by exposing this flaw in experimental procedure, we highlight the importance of using... [full abstract]
Jishnu Mukhoti, Pontus Stenetorp, Yarin Gal
Workshop on Bayesian Deep Learning, NeurIPS 2018
[Paper] [arXiv] [BibTex]
Evaluating Bayesian Deep Learning Methods for Semantic Segmentation
Deep learning has been revolutionary for computer vision and semantic segmentation in particular, with Bayesian Deep Learning (BDL) used to obtain uncertainty maps from deep models when predicting semantic classes. This information is critical when using semantic segmentation for autonomous driving for example. Standard semantic segmentation systems have well-established evaluation metrics. However, with BDL's rising popularity in computer vision we require new metrics to evaluate whether a BDL method produces better uncertainty estimates than another method. In this work we propose three such metrics to evaluate BDL models designed specifically for the task of semantic segmentation. We modify DeepLab-v3+, one of the state-of-the-art deep neural networks, and create its Bayesian counterpart using MC dropout and Concrete dropout as inference techniques. We then compare and test these two inference techniques on the well-known Cityscapes dataset using our suggested metrics. Our resul... [full abstract]
Jishnu Mukhoti, Yarin Gal
arXiv
[arXiv] [BibTex]
Evaluating Uncertainty Quantification in End-to-End Autonomous Driving Control
Self-driving has benefited from significant performance improvements with the rise of deep learning, with millions of miles having been driven with no human intervention. Despite this, crashes and erroneous behaviours still occur, in part due to the complexity of verifying the correctness of DNNs and a lack of safety guarantees. In this paper, we demonstrate how quantitative measures of uncertainty can be extracted in real-time, and their quality evaluated in end-to-end controllers for self-driving cars. We propose evaluation techniques for the uncertainty on two separate architectures which use the uncertainty to predict crashes up to five seconds in advance. We find that mutual information, a measure of uncertainty in classification networks, is a promising indicator of forthcoming crashes.
Rhiannon Michelmore, Marta Kwiatkowska, Yarin Gal
In submission
[arXiv] [BibTex]
Targeted Dropout
Neural networks are extremely flexible models due to their large number of parameters, which is beneficial for learning, but also highly redundant. This makes it possible to compress neural networks without having a drastic effect on performance. We introduce targeted dropout, a strategy for post hoc pruning of neural network weights and units that builds the pruning mechanism directly into learning. At each weight update, targeted dropout selects a candidate set for pruning using a simple selection criterion, and then stochastically prunes the network via dropout applied to this set. The resulting network learns to be explicitly robust to pruning, comparing favourably to more complicated regularization schemes while at the same time being extremely simple to implement, and easy to tune.
Aidan Gomez, Ivan Zhang, Kevin Swersky, Yarin Gal, Geoffrey E. Hinton
Workshop on Compact Deep Neural Networks with industrial applications, NeurIPS 2018
[Paper] [BibTex]

A Unifying Bayesian View of Continual Learning
Some machine learning applications require continual learning—where data comes in a sequence of datasets, each is used for training and then permanently discarded. From a Bayesian perspective, continual learning seems straightforward: Given the model posterior one would simply use this as the prior for the next task. However, exact posterior evaluation is intractable with many models, especially with Bayesian neural networks (BNNs). Instead, posterior approximations are often sought. Unfortunately, when posterior approximations are used, prior-focused approaches do not succeed in evaluations designed to capture properties of realistic continual learning use cases. As an alternative to prior-focused methods, we introduce a new approximate Bayesian derivation of the continual learning loss. Our loss does not rely on the posterior from earlier tasks, and instead adapts the model itself by changing the likelihood term. We call these approaches likelihood-focused. We then combine prior-... [full abstract]
Sebastian Farquhar, Yarin Gal
NeurIPS 2018 workshop on Bayesian Deep Learning
[Paper] [BibTex]

Using Bayesian Optimization to Find Asteroids' Pole Directions
Near-Earth asteroids (NEAs) are being discovered much faster than their shapes and other physical properties can be characterized in detail. One of the best ways to spatially resolve NEAs from the ground is with planetary radar observations. Radar echoes can be decoded in round-trip travel time and frequency to produce two-dimensional delay-Doppler images of the asteroid. Given a series of such images acquired over the course of the asteroid's rotation, one can search for the shape and other physical properties that best match the observations. However, reconstructing asteroid shapes from radar data is, like many inverse problems, a computationally intensive task. Shape modeling also requires extensive human oversight to ensure that the fitting process is finding physically reasonable results. In this paper we use Bayesian optimisation for this difficult task.
Marshall, Sean, Cobb, Adam, Raïssi, Chedy, Yarin Gal, Rozek, Agata, Busch, Michael W., Young, Grace, McGlasson, Riley
American Astronomical Society (AAS), 2018
[Citation] [BibTex]
An Empirical study of Binary Neural Networks' Optimisation
Binary neural networks using the Straight-Through-Estimator (STE) have been shown to achieve state-of-the-art results, but their training process is not well-founded. This is due to the discrepancy between the evaluated function in the forward path, and the weight updates in the back-propagation, updates which do not correspond to gradients of the forward path. Efficient convergence and accuracy of binary models often rely on careful fine-tuning and various ad-hoc techniques. In this work, we empirically identify and study the effectiveness of the various ad-hoc techniques commonly used in the literature, providing best-practices for efficient training of binary models. We show that adapting learning rates using second moment methods is crucial for the successful use of the STE, and that other optimisers can easily get stuck in local minima. We also find that many of the commonly employed tricks are only effective towards the end of the training, with these methods making early sta... [full abstract]
Milad Alizadeh, Javier Fernández-Marqués, Nicholas D. Lane, Yarin Gal
International Conference on Learning Representations (ICLR), 2019
[Paper] [Code]

BRUNO: A Deep Recurrent Model for Exchangeable Data
We present a novel model architecture which leverages deep learning tools to perform exact Bayesian inference on sets of high dimensional, complex observations. Our model is provably exchangeable, meaning that the joint distribution over observations is invariant under permutation: this property lies at the heart of Bayesian inference. The model does not require variational approximations to train, and new samples can be generated conditional on previous samples, with cost linear in the size of the conditioning set. The advantages of our architecture are demonstrated on learning tasks that require generalisation from short observed sequences while modelling sequence variability, such as conditional image generation, few-shot learning, and anomaly detection.
Iryna Korshunova, Jonas Degrave, Ferenc Huszár, Yarin Gal, Arthur Gretton, Joni Dambre
arXiv, 2018
[arXiv] [BibTex]
NIPS, 2018
[Paper] [BibTex]

Sufficient Conditions for Idealised Models to Have No Adversarial Examples: a Theoretical and Empirical Study with Bayesian Neural Networks
We prove, under two sufficient conditions, that idealised models can have no adversarial examples. We discuss which idealised models satisfy our conditions, and show that idealised Bayesian neural networks (BNNs) satisfy these. We continue by studying near-idealised BNNs using HMC inference, demonstrating the theoretical ideas in practice. We experiment with HMC on synthetic data derived from MNIST for which we know the ground-truth image density, showing that near-perfect epistemic uncertainty correlates to density under image manifold, and that adversarial images lie off the manifold in our setting. This suggests why MC dropout, which can be seen as performing approximate inference, has been observed to be an effective defence against adversarial examples in practice; We highlight failure-cases of non-idealised BNNs relying on dropout, suggesting a new attack for dropout models and a new defence as well. Lastly, we demonstrate the defence on a cats-vs-dogs image classification ta... [full abstract]
Lewis Smith, Yarin Gal
arXiv, 2018
[arXiv] [BibTex]
Automating Asteroid Shape Modeling From Radar Images
Characterizing the shapes and spin states of near-Earth asteroids is essential both for trajectory predictions to rule out potential future Earth impacts and for planning spacecraft missions. But reconstructing objects’ shapes and spins from delay-Doppler data is a computationally intensive inversion problem. We implement a Bayesian optimization routine that uses SHAPE to autonomously search the space of spin-state parameters, yielding spin state constraints within a factor of 3 less computer runtime and minimal human supervision. These routines are now being incorporated into radar data processing pipelines at Arecibo.
Michael W. Busch, Agata Rozek, Sean Marshall, Grace Young, Adam Cobb, Chedy Raissi, Yarin Gal, Lance Benner, Shantanu Naidu, Marina Brozovic, Patrick Taylor
COSPAR (Committee on Space Research) Assembly, 2018
[Blog Post (Adam Cobb)] [BibTex]
Fast and Scalable Bayesian Deep Learning by Weight-Perturbation in Adam
Uncertainty computation in deep learning is essential to design robust and reliable systems. Variational inference (VI) is a promising approach for such computation, but requires more effort to implement and execute compared to maximum-likelihood methods. In this paper, we propose new natural-gradient algorithms to reduce such efforts for Gaussian mean-field VI. Our algorithms can be implemented within the Adam optimizer by perturbing the network weights during gradient evaluations, and uncertainty estimates can be cheaply obtained by using the vector that adapts the learning rate. This requires lower memory, computation, and implementation effort than existing VI methods, while obtaining uncertainty estimates of comparable quality. Our empirical results confirm this and further suggest that the weight-perturbation in our algorithm could be useful for exploration in reinforcement learning and stochastic optimization.
Mohammad Emtiyaz Khan, Didrik Nielsen, Voot Tangkaratt, Wu Lin, Yarin Gal, Akash Srivastava
ICML, 2018
[Paper] [arXiv] [BibTex]

Differentially private continual learning
Catastrophic forgetting can be a significant problem for institutions that must delete historic data for privacy reasons. For example, hospitals might not be able to retain patient data permanently. But neural networks trained on recent data alone will tend to forget lessons learned on old data. We present a differentially private continual learning framework based on variational inference. We estimate the likelihood of past data given the current model using differentially private generative models of old datasets. The differentially private training has no detrimental impact on our architecture's continual learning performance, and still outperforms the current state-of-the-art non-private continual learning.
Sebastian Farquhar, Yarin Gal
Privacy in Machine Learning and Artificial Intelligence workshop, ICML, 2018
[Paper] [BibTex]

Loss-Calibrated Approximate Inference in Bayesian Neural Networks
Current approaches in approximate inference for Bayesian neural networks minimise the Kullback-Leibler divergence to approximate the true posterior over the weights. However, this approximation is without knowledge of the final application, and therefore cannot guarantee optimal predictions for a given task. To make more suitable task-specific approximations, we introduce a new loss-calibrated evidence lower bound for Bayesian neural networks in the context of supervised learning, informed by Bayesian decision theory. By introducing a lower bound that depends on a utility function, we ensure that our approximation achieves higher utility than traditional methods for applications that have asymmetric utility functions. Furthermore, in using dropout inference, we highlight that our new objective is identical to that of standard dropout neural networks, with an additional utility-dependent penalty term. We demonstrate our new loss-calibrated model with an illustrative medical example ... [full abstract]
Adam D. Cobb, Stephen J. Roberts, Yarin Gal
Theory of deep learning workshop, ICML, 2018
[arXiv] [Code] [BibTex]
Using Pre-trained Full-Precision Models to Speed Up Training Binary Networks For Mobile Devices
Binary Neural Networks (BNNs) are well-suited for deploying Deep Neural Networks (DNNs) to small embedded devices but state-of-the-art BNNs need to be trained from scratch. We show how weights from a trained full-precision model can be used to speed-up training binary networks. We show that for CIFAR-10, accuracies within 1% of the full-precision model can be achieved in just 5 epochs.
Milad Alizadeh, Nicholas D. Lane, Yarin Gal
16th ACM International Conference on Mobile Systems (MobiSys), 2018
[Abstract] [BibTex]
Towards Robust Evaluations of Continual Learning
Continual learning experiments used in current deep learning papers do not faithfully assess fundamental challenges of learning continually, masking weak-points of the suggested approaches instead. We study gaps in such existing evaluations, proposing essential experimental evaluations that are more representative of continual learning's challenges, and suggest a re-prioritization of research efforts in the field. We show that current approaches fail with our new evaluations and, to analyse these failures, we propose a variational loss which unifies many existing solutions to continual learning under a Bayesian framing, as either 'prior-focused' or 'likelihood-focused'. We show that while prior-focused approaches such as EWC and VCL perform well on existing evaluations, they perform dramatically worse when compared to likelihood-focused approaches on other simple tasks.
Sebastian Farquhar, Yarin Gal
Lifelong Learning: A Reinforcement Learning Approach workshop, ICML, 2018
[arXiv] [BibTex]

Understanding Measures of Uncertainty for Adversarial Example Detection
Measuring uncertainty is a promising technique for detecting adversarial examples, crafted inputs on which the model predicts an incorrect class with high confidence. But many measures of uncertainty exist, including predictive entropy and mutual information, each capturing different types of uncertainty. We study these measures, and shed light on why mutual information seems to be effective at the task of adversarial example detection. We highlight failure modes for MC dropout, a widely used approach for estimating uncertainty in deep models. This leads to an improved understanding of the drawbacks of current methods, and a proposal to improve the quality of uncertainty estimates using probabilistic model ensembles. We give illustrative experiments using MNIST to demonstrate the intuition underlying the different measures of uncertainty, as well as experiments on a real world Kaggle dogs vs cats classification dataset.
Lewis Smith, Yarin Gal
UAI, 2018
[Paper] [arXiv] [BibTex]
Vprop: Variational Inference using RMSprop
Many computationally-efficient methods for Bayesian deep learning rely on continuous optimization algorithms, but the implementation of these methods requires significant changes to existing code-bases. In this paper, we propose Vprop, a method for variational inference that can be implemented with two minor changes to the off-the-shelf RMSprop optimizer. Vprop also reduces the memory requirements of Black-Box Variational Inference by half. We derive Vprop using the conjugate-computation variational inference method, and establish its connections to Newton’s method, natural-gradient methods, and extended Kalman filters. Overall, this paper presents Vprop as a principled, computationally-efficient, and easy-to-implement method for Bayesian deep learning.
Mohammad Emtiyaz Khan, Zuozhu Liu, Voot Tangkaratt, Yarin Gal
Bayesian Deep Learning workshop, NIPS, 2017
[Paper] [arXiv] [BibTex]
News items mentioning Yarin Gal:

Oxford researchers join landmark UK Initiative to build next-generation open-source AI
03 Jul 2026
Yarin Gal, Mark van der Wilk, Michael Bronstein and Michael Wooldridge are among the leading academic partners behind a major new UK AI research initiative, the Science of Fundamental AI Research (SOFAIR) Lab. Read more here


Lin Li and Yarin Gal awarded $371k grant to improve safety of LLMs
08 May 2026
Research Associate Lin Li and Professor Yarin Gal from OATML have won a $371,000 (£274,000) grant from US philanthropy organisation Coefficient Giving to improve the safety of LLMs. Read more here
Group Work on Open-Weight Model Safeguards published in Nature
07 Oct 2025
OATML group leader Yarin Gal and collaborator Stephen Casper have published an editorial in Nature detailing the risks and opportunities posed by open-weight systems, and outlining safeguarding strategies to mitigate potential misuse. You can read the work here.

Yarin Gal speaks at Royal Society's 75th Anniversary of the Turing Test
02 Oct 2025
Yarin Gal was a featured panelist at the Royal Society’s celebration of the 75th anniversary of the Turing Test, held on 2 October 2025 at the Royal Society, London. A recording of the event can be viewed here.

ICML 2024 GRaM workshop 'Best Paper' awarded
29 Jul 2024
A paper by Yoav Gelberg, Tycho F.A. van der Ouderaa, Mark van der Wilk and Yarin Gal received the top award in the Proceedings track of the ICML Workshop on Geometry-grounded Representation Learning and Generative Modeling (GRaM). You can read the paper on variational inference failures under model symmetries here.
Group work on model collapse in LLMs published in Nature
24 Jul 2024
OATML group members Ilia Shumailov and Yarin Gal published a study in Nature which finds that indiscriminate use of model-generated content in training causes irreversible defects in the resulting models, in which tails of the original content distribution disappear. You can read the paper here.
Group work on detecting hallucinations in LLMs published in Nature
19 Jun 2024
OATML group members Sebastian Farquhar, Jannik Kossen and Yarin Gal, along with group alumni Lorenz Kuhn, published a study in Nature which introduces a breakthrough method for detecting hallucinations in LLMs using semantic entropy. You can read the paper here.

Yarin Gal Appointed Director of Research at Frontier AI Taskforce
20 Sep 2023
Yarin Gal has been appointed as the Director of Research at the new government Frontier AI Taskforce. As the Taskforce’s first progress report explains, Yarin’s appointment reflects his status as ‘a globally recognised leader in Machine Learning’.
OATML to co-organize the Machine Learning for Drug Discovery (MLDD) workshop at ICLR 2023
21 Dec 2022
OATML students Pascal Notin and Clare Lyle, along with OATML group leader Yarin Gal, are co-organizing the Machine Learning for Drug Discovery (MLDD) workshop at ICLR 2023 jointly with collaborators at GSK, Genentech, Harvard, MIT and others. OATML students Neil Band, Freddie Bickford Smith, Jan Brauner, Lars Holdijk, Andrew Jesson, Andreas Kirsch, Shreshth Malik, Lood van Niekirk and Ruben Wietzman are part of the program committee.
OATML members win Oxford Divisional Impact Award
11 Jul 2022
Prof. Gal, Jan Brauner, Sören Mindermann and Mrinank Sharma have won the MPLS Social Impact Award for their work on evaluating the effectiveness of Covid-19 internentions. Congratulations to all those awarded!

OATML to co-organize GeneDisco Challenge
31 Jan 2022
OATML and GSK are co-organizing the GeneDisco Challenge at ICLR 2022. You can find out more about the challenge here, and read the GeneDisco paper here.
OATML to co-organize the Machine Learning for Drug Discovery (MLDD) workshop at ICLR 2022
15 Jan 2022
OATML students Pascal Notin, Andrew Jesson and Clare Lyle, along with OATML group leader Professor Yarin Gal, are co-organizing the first Machine Learning for Drug Discovery (MLDD) workshop at ICLR 2022 jointly with collaborators at GSK, Harvard, MILA, MIT and others. OATML students Neil Band, Freddie Bickford Smith, Jan Brauner, Lars Holdijk, Andreas Kirsch, Jannik Kossen and Muhammed Razzak are part of the PC.

Yarin Gal one of five Samsung AI Researchers of the Year
06 Nov 2021
Professor Yarin Gal has been announced as one of five ‘Samsung AI Researcher of the Year’ award winners. The awards were launched last year to discover rising AI researchers globally.
OATML researchers publish paper in Nature
03 Nov 2021
The paper “Disease variant prediction with deep generative models of evolutionary data” was published in Nature. The work is a collaboration between OATML and the Marks lab at Harvard Medical School. It was led by Pascal Notin and Professor Yarin Gal from OATML together with Jonathan Frazer, Mafalda Dias, and Debbie Marks from the Marks lab. OATML DPhil student Aidan Gomez and Marks lab researchers Joseph Min and Kelly Brock are co-authors on the paper.

NeurIPS 2021
11 Oct 2021
Thirteen papers with OATML members accepted to NeurIPS 2021 main conference. More information in our blog post.
OATML researchers advise UK Cabinet Office
24 Sep 2021
Jan Brauner and Sören Mindermann have presented their work with Professor Yarin Gal and other collaborators on the effectiveness of mask-wearing at reducing COVID-19 transmission to the UK Cabinet Office and advised the office on mask-wearing policies.
NeurIPS 2021 Workshop and Challenges
30 Aug 2021
We’re co-organising the Bayesian Deep Learning Workshop at NeurIPS 2021 as well as two challenges: Approximate Inference in Bayesian Deep Learning and Shifts Challenge: Robustness and Uncertainty under Real-World Distributional Shift. This effort is led by Professor Yarin Gal, Neil Band, Sebastian Farquhar, and collaborators.

OATML researchers to present at Stanford University Lecture Course CS25: Transformers United
22 Aug 2021
OATML graduate students Aidan Gomez, Jannik Kossen, and Neil Band will be presenting their recent paper Self-Attention Between Datapoints: Going Beyond Individual Input-Output Pairs in Deep Learning that introduces Non-Parametric Transformers at the Stanford Lecture Course ‘CS25: Transformers United’ on November 1, 2021. Professor Yarin Gal, Dr. Tom Rainforth, and OATML DPhil student Clare Lyle are co-authors on the paper.
The lecture is available online here.

OATML researchers to speak at Google Research
22 Aug 2021
OATML students Jannik Kossen and Neil Band will be presenting their recent paper Self-Attention Between Datapoints: Going Beyond Individual Input-Output Pairs in Deep Learning at Google Research on September 14, 2021. Professor Yarin Gal, Dr. Tom Rainforth, and OATML DPhil students Clare Lyle and Aidan Gomez are co-authors on the paper.

OATML student receives a best poster award at the ICML workshop on Computational Biology
07 Aug 2021
OATML MSc student Lood van Niekerk received a best poster award at the 2021 ICML Workshop on Computational Biology for his work on “Exploring the latent space of deep generative models: Applications to G-protein coupled receptors”. This is part of an ongoing collaboration between OATML and the Marks Lab. From OATML, Professor Yarin Gal and DPhil student Pascal Notin are co-authors on the paper.

OATML researcher presents at AI Campus Berlin
06 Aug 2021
OATML DPhil student Jannik Kossen gives invited talks at AI Campus Berlin on two recent papers: Self-Attention Between Datapoints: Going Beyond Individual Input-Output Pairs in Deep Learning and Active Testing: Sample-Efficient Model Evaluation. Recordings of are available upon request. Announcements are here and here. Professor Yarin Gal, Dr. Tom Rainforth, and OATML graduate students Sebastian Farquhar, Neil Band, Clare Lyle, and Aidan Gomez are co-authors on the papers.

OATML researchers give talk at CERN on Uncertainty in ML
29 Jul 2021
OATML graduate student Lewis Smith and Professor Yarin Gal gave a talk on uncertainty in ML, discussing their collaboration with Adi Hanuka on uncertainty quantification for virtual diagnostics in the SLAC accelerator.

OATML research featured by NASA
24 Jul 2021
OATML research project has been covered by NASA, and featured on NASA’s home page. This research, published in Astronomy & Astrophysics, focuses on improving data for solar research. This was part of a collaboration between OATML and the Frontier Development Lab
ICML 2021
17 Jul 2021
Seven papers with OATML members accepted to ICML 2021, together with 14 workshop papers. More information in our blog post.

OATML researchers to speak at Cohere
09 Jul 2021
OATML students Jannik Kossen and Neil Band present their recent paper Self-Attention Between Datapoints: Going Beyond Individual Input-Output Pairs in Deep Learning at Cohere on July 9, 2021. Professor Yarin Gal, Dr. Tom Rainforth, and OATML DPhil students Clare Lyle and Aidan Gomez are also co-authors on the paper.

Artificial Intelligence to detect floods is launched into space
29 Jun 2021
OATML PhD Student Lewis Smith, along with Yarin Gal and Atılım Güneş Baydin, are part of the team invlved in developing an ML model to detect flood events, which has now been deployed in space. This is a project done in collaboration with the European Space Agency, Trillium Technologies and leaders in commercial AI, such as Google Cloud and Intel. You can read more about their work here
OATML researchers publish paper in Nature Scientific Reports
31 Mar 2021
OATML graduate student Lewis Smith’s work together with Professor Yarin Gal, as part of FDL 2019, was published as a full length paper in Nature Scientific Reports. This work was a collaboration between the four members of his team, and academics from several universities.
OATML student invited to speak at the Cornell ML in Medicine seminar series
19 Mar 2021
OATML graduate student Pascal Notin will give an invited talk on Uncertainty in deep generative models with applications to genomics and drug design at the Cornell Machine Learning in Medicine seminar series. Professor Yarin Gal and collaborator José Miguel Hernández-Lobato are co-authors on the paper.
OATML student invited to speak at the EMBL workshop on ML in Drug Discovery
11 Mar 2021
OATML graduate student Pascal Notin will give an invited talk on “Large-scale clinical interpretation of genetic variants using evolutionary data and deep generative models” at the EMBL-EBI workshop on Machine Learning in Drug Discovery. The work is a collaboration between OATML (Pascal and Professor Yarin Gal) and the Marks Lab at Harvard.
OATML student invited to speak at UCL AI Centre Seminar Series
10 Feb 2021
OATML graduate student Seb Farquhar will speak on approximate Bayes in large neural networks drawing on Liberty or Depth (NeurIPS 2020) and Radial BNNs (AI Stats 2020) at the UCL Centre for Artificial Intelligence Seminar Series. Professor Yarin Gal, OATML graduate student Lewis Smith and collaborator Mike Osborne are co-authors on the papers.
OATML researcher to speak at Max Planck Institute & UCLA
17 Dec 2020
OATML graduate student Tim G. J. Rudner will give an invited talk on Outcome-Driven Reinforcement Learning via Variational Inference at the MPI+UCLA Mathematical Machine Learning Seminar. Professor Yarin Gal and collaborator Sergey Levine are also co-authors on the paper.
OATML researchers publish paper in Science
15 Dec 2020
The paper called “Inferring the effectiveness of government interventions against COVID-19” was published in Science today. The work is a collaboration with researchers from 9 universities, led by OATML graduate students Sören Mindermann and Jan Brauner, together with Mrinank Sharma from the Department of Statistics.
OATML researchers invited to speak at the German Centre for Infection Research
26 Oct 2020
OATML graduate students Sören Mindermann and Jan Brauner, together with Mrinank Sharma from the Department of Statistics, were invited to give a talk about their work with Professor Yarin Gal on ‘inferring the effects of non-pharmaceutical interventions against COVID-19’, at the German Centre for Infection Research/University of Cologne.
OATML student to speak at University of Cambridge
16 Oct 2020
OATML graduate student Tim G. J. Rudner will give an invited talk about his work with Professor Yarin Gal on Inter-domain Deep Gaussian Processes at the University of Cambridge’s ML@CS Seminar.

OATML student presents at Accenture Turing Innovation Symposium
02 Oct 2020
OATML graduate student Lisa Schut presented alongside Rory McGrath, from Accenture Labs, on “Counterfactual Explanations: Making AI decision-making more useful and trustworthy.” The research presented was joint work with Oscar Key and Professor Yarin Gal, in collaboration with Accenture Labs.

OATML researcher invited to speak at Simons Institute
29 Sep 2020
OATML graduate student Clare Lyle will be giving a talk about her work with Professor Yarin Gal on causal inference and generalization in deep reinforcement learning at the Simons Institute Workshop on Deep Reinforcement Learning on Thursday October 1.

Yarin Gal to give Keynote at MICCAI UNSURE workshop
26 Sep 2020
Prof Yarin Gal will give a keynote talk at the Uncertainty for Safe Utilization of Machine Learning in Medical Imaging (UNSURE) workshop at the Medical Image Computing and Computer Assisted Intervention (MICCAI) conference. He will discuss work done at OATML on AI in medical imaging. The talk will cover work on topics ranging from data efficient AI to safe and interpretable AI.
BAYESIAN DEEP LEARNING 101
01 Sep 2020
Prof Yarin Gal’s MLSS seminars on Bayesian Deep Learning are available on YouTube (part 1 and part 2), with additional resources available here.

OATML researcher to speak at Waymo and Rutherford Appleton Laboratory
06 Jun 2020
OATML graduate student Joost van Amersfoort was invited to talk about his work with Professor Yarin Gal on deterministic uncertainty quantification (DUQ) at Waymo (March 27th) and Rutherford Appleton Laboratory (June 18th).

OATML researchers to speak at Africa CDC on COVID-19
06 Jun 2020
OATML graduate students Jan Brauner and Sören Mindermann will give an invited talk at Africa CDC, Africa’s intercontinental public health agency, on June 12. They will present their work with Professor Yarin Gal on nonpharmacetical interventions against COVID-19 to the COVID-19 modelling group.
Uncertainty in Brain Tumor Segmentation Challenge
05 Jun 2020
We’re organising the second “Quantification of Uncertainty in Segmentation” task as part of the Multimodal Brain Tumor Segmentation Challenge at MICCAI 2020, together with Angelos Filos, Raghav Mehta and Tal Arbel.
Bayesian deep learning for all humankind
14 Jan 2020
Our work with NASA and ESA over the past few years, together with Lewis Smith and Tim G. J. Rudner, is summarised in a recent article written by James Parr. Read more in Inspired: Bayesian deep learning for all humankind

MIT Technology Review names Yarin Gal on their Innovators Under 35 Europe 2019 list
19 Dec 2019
Since 1999, MIT Technology Review has recognised young innovators and talented entrepreneurs from different countries who are developing new technologies to help solve the problems that affect our society. Yarin has been included in the ‘pioneers’ category. Read more: AI still makes mistakes, but his tools can alert us when a system is about to go wrong

Yarin Gal announced as Turing AI Fellow
24 Oct 2019
Yarin Gal is one of five new Turing AI Fellows announced by The Alan Turing Institute. The Office for Artificial Intelligence, The Alan Turing Institute and UK Research and Innovation (UKRI) have worked together to successfully attract the Turing AI Fellows, some of the best research talent from around the world. Yarin will work on democratising safe and robust AI. Read more: Turing AI Fellows
Uncertainty in Brain Tumor Segmentation Challenge
15 Aug 2019
We’re organising a “Quantification of Uncertainty in Segmentation” task as part of the Multimodal Brain Tumor Segmentation Challenge at MICCAI 2019, together with Angelos Filos, Raghav Mehta and Tal Arbel.
Fourth Bayesian Deep Learning Workshop
01 Aug 2019
We’re organising the Fourth Bayesian Deep Learning Workshop at NeurIPS 2019. This effort is led by Professor Yarin Gal and collaborators.
Yarin Gal to speak at the European Space Agency
01 Jun 2019
Prof Yarin Gal will be speaking at the European Space Agency’s Phi-week, discussing work done at OATML on AI in space. The talk will cover work on topics ranging from exoplanet atmospheric retrieval to asteroid shape modelling from radar data.
Yarin Gal to speak at the Royal Society's Summer Science Exhibition on AI and Art
02 May 2019
Prof Yarin Gal will be speaking at the Royal Society’s Summer Science Exhibition on 6 July, discussing work on AI and art. The talk will cover techniques in machine learning that give us the chance to venture beyond the frame of some famous paintings.

Yarin Gal to speak at the UN summit on "AI for Good"
02 Apr 2019
Prof Yarin Gal will give a talk at the UN summit on “AI for Good” on the development of AI which we can trust: How can we develop trust-worthy machine learning tools to be deployed in the wild? He will further participate in a panel discussion on the topic IT’S A MATTER OF TRUST.
Third Bayesian Deep Learning Workshop
17 Oct 2018
We’re organising the Third Bayesian Deep Learning Workshop at NeurIPS 2018. This effort is led by Professor Yarin Gal and collaborators.
Reproducibility and Code
AI models collapse when trained on recursively generated data
This is the code repository for the paper “AI models collapse when trained on recursively generated data”.
CodeIlia Shumailov, Zakhar Shumaylov, Yiren Zhao, Nicolas Papernot, Ross Anderson, Yarin Gal

Detecting hallucinations in large language models using semantic entropy
This is the code repository for the paper “Detecting hallucinations in large language models using semantic entropy”.
CodeSebastian Farquhar, Jannik Kossen, Lorenz Kuhn, Yarin Gal
Machine Learning Summer School (MLSS) Moscow: Bayesian Deep Learning 101
Slide decks from the Bayesian Deep Learning talks at the Machine Learning Summer School (MLSS) Moscow, with uncertainty demoes and practical tutorials in sampling functions and active learning (practical credit: Ivan Nazarov).
CodeYarin Gal
Code for BatchBALD blog post and paper (active learning)
This is the code for the blog post Human in the Loop: Deep Learning without Wasteful Labelling and the paper BatchBALD: Efficient and Diverse Batch Acquisition for Deep Bayesian Active Learning.
Code, PublicationAndreas Kirsch, Joost van Amersfoort, Yarin Gal

Code for Bayesian Deep Learning Benchmarks
In order to make real-world difference with Bayesian Deep Learning (BDL) tools, the tools must scale to real-world settings. And for that we, the research community, must be able to evaluate our inference tools (and iterate quickly) with real-world benchmark tasks. We should be able to do this without necessarily worrying about application-specific domain knowledge, like the expertise often required in medical applications for example. We require benchmarks to test for inference robustness, performance, and accuracy, in addition to cost and effort of development. These benchmarks should be at a variety of scales, ranging from toy MNIST-scale benchmarks for fast development cycles, to large data benchmarks which are truthful to real-world applications, capturing their constraints.
CodeAngelos Filos, Sebastian Farquhar, Aidan Gomez, Tim G. J. Rudner, Zac Kenton, Lewis Smith, Milad Alizadeh, Yarin Gal
Code for "An Ensemble of Bayesian Neural Networks for Exoplanetary Atmospheric Retrieval"
Recent work demonstrated the potential of using machine learning algorithms for atmospheric retrieval by implementing a random forest to perform retrievals in seconds that are consistent with the traditional, computationally-expensive nested-sampling retrieval method. We expand upon their approach by presenting a new machine learning model, exttt{plan-net}, based on an ensemble of Bayesian neural networks that yields more accurate inferences than the random forest for the same data set of synthetic transmission spectra.
Code, PublicationAdam D. Cobb, Michael D. Himes, Frank Soboczenski, Simone Zorzan, Molly D. O'Beirne, Atılım Güneş Baydin, Yarin Gal, Shawn D. Domagal-Goldman, Giada N. Arney, Daniel Angerhausen
FDL2017: Lunar Water and Volatiles
This repository represents the work of the Frontier Development Labs 2017: Lunar Water and Volatiles team.
NASA’s LCROSS mission indicated that water is present in the permanently shadowed regions of the Lunar poles. Water is a key resource for human spaceflight, not least for astronaut life-support but also as an ingredient for rocket fuels.
It is important that the presence of Lunar water is further quantified through rover missions such as NASA’s Resource Prospector (RP). RP will be required to traverse the lunar polar regions and evaluate water distribution by periodically drilling to suitable depths to retrieve samples for analysis.
In order to maximise the value of RP and of future missions, it is important for robust and effective plans to be constructed. This year’s LWAV team began by replicating traverse planning algorithms currently in use by NASA JPL. However, when beginning an automated search for maximally lengthed traverses an opportunity became apparent.
Current maps of the Lunar surface are in large composed from optical images captured by the Lunar Reconnaissance Orbiter (LRO) mission. For our study we were largely interested in optical images from the LRO Narrow Angled Camera (NAC), and elevation measures from the Lunar Orbiter Laser Altimeter Digital Elevation Model (LOLA DEM)….
CodeDietmar Backes, Timothy Seabrook, Eleni Bohacek, Anthony Dobrovolskis, Casey Handmer, Yarin Gal
Blog Posts

OATML at ICML 2026
OATML group members and collaborators are proud to present 5 papers at ICML 2026. …
Full post...Yarin Gal, Sergio Calvo Ordoñez, Sören Mindermann, Panagiotis Tigas, Lin Li, Suhaas Bhat, Gabriel Jones, 08 Jul 2026
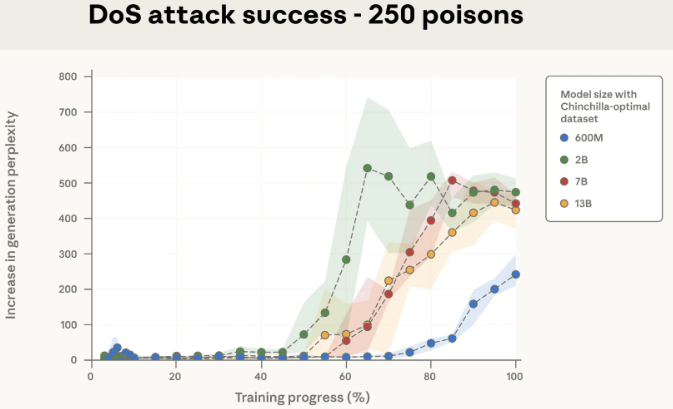
Poisoning Attacks on LLMs Require a Near-constant Number of Poison Samples
Joint work with OATML, Anthropic, the UK Government’s AI Security Institute (AISI), and the Alan Turing Institute finds that as few as 250 malicious documents can produce a “backdoor” vulnerability in a large language model—regardless of model size or training data volume. Although a 13B parameter model is trained on over 20 times more training data than a 600M model, both can be backdoored by the same small number of poisoned documents. Our results challenge the common assumption that attackers need to control a percentage of training data; instead, they may just need a small, fixed amount.
See the paper Poisoning Attacks on LLMs Require a Near-constant Number of Poison Samples, and
Anthropic’s full accompanying blog post.
Xander Davies, Yarin Gal, 09 Oct 2025
OATML conference papers at NeurIPS 2025
OATML group members and collaborators are proud to present 8 papers at NeurIPS 2025. …
Full post...Yarin Gal, Lukas Aichberger, Jannik Kossen, Luckeciano Carvalho Melo, Gunshi Gupta, Muhammed Razzak, Freddie Bickford Smith, Xander Davies, Hazel Kim, 19 Sep 2025
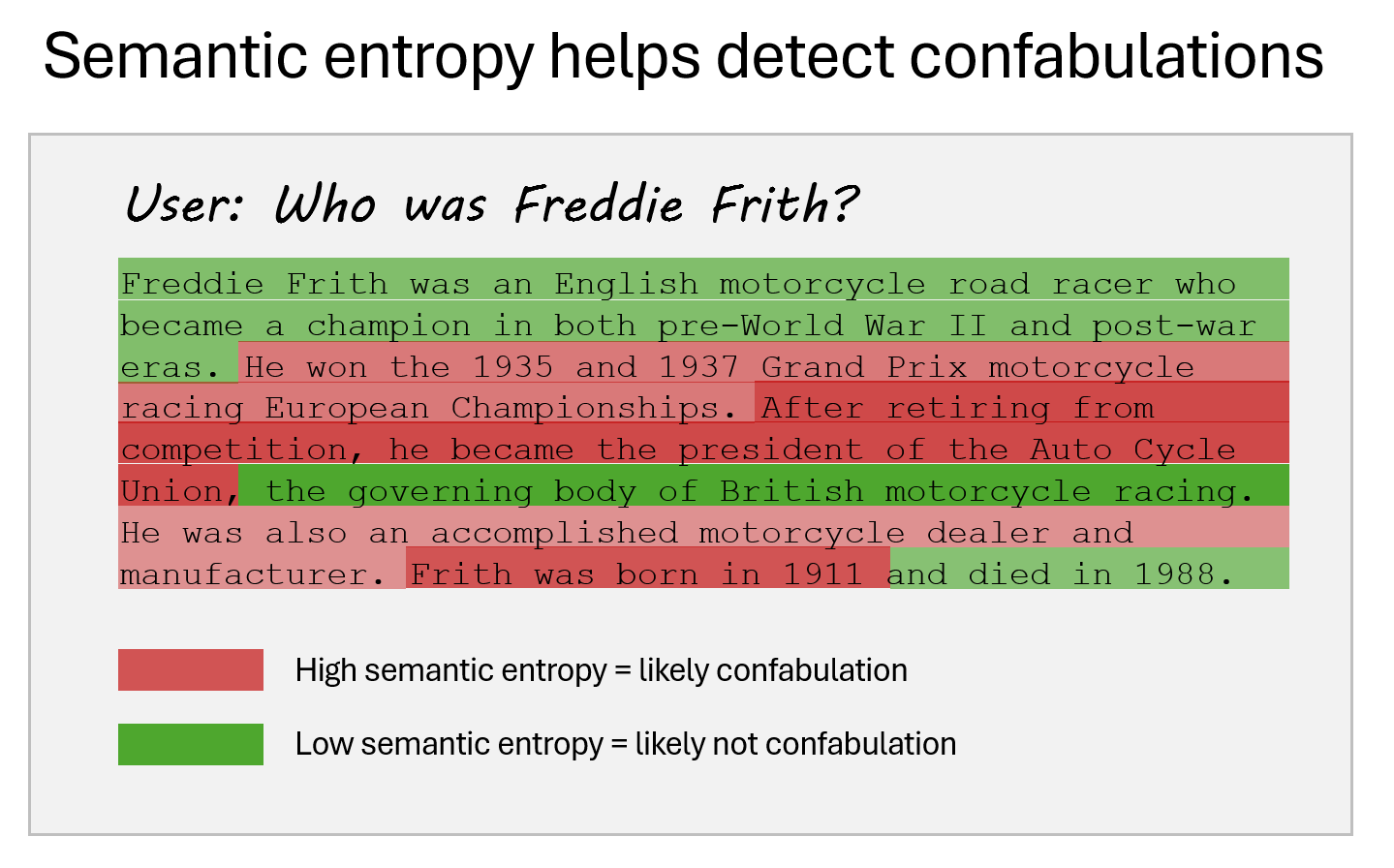
Detecting hallucinations in large language models using semantic entropy
Can we detect confabulations, where LLMs invent plausible-sounding factoids? We show how, in research published at Nature. …
Full post...Sebastian Farquhar, Jannik Kossen, Lorenz Kuhn, Yarin Gal, 19 Jun 2024
OATML Conference papers at NeurIPS 2022
OATML group members and collaborators are proud to present 8 papers at NeurIPS 2022 main conference, and 11 workshop papers. …
Full post...Yarin Gal, Freddie Kalaitzis, Shreshth Malik, Lorenz Kuhn, Gunshi Gupta, Jannik Kossen, Pascal Notin, Andrew Jesson, Panagiotis Tigas, Tim G. J. Rudner, Sebastian Farquhar, Ilia Shumailov, 25 Nov 2022
OATML at ICML 2022
OATML group members and collaborators are proud to present 11 papers at the ICML 2022 main conference and workshops. Group members are also co-organizing the Workshop on Computational Biology, and the Oxford Wom*n Social. …
Full post...Sören Mindermann, Jan Brauner, Muhammed Razzak, Andreas Kirsch, Aidan Gomez, Sebastian Farquhar, Pascal Notin, Tim G. J. Rudner, Freddie Bickford Smith, Neil Band, Panagiotis Tigas, Andrew Jesson, Lars Holdijk, Joost van Amersfoort, Kelsey Doerksen, Jannik Kossen, Yarin Gal, 17 Jul 2022

OATML at ICLR 2022
OATML group members and collaborators are proud to present 4 papers at ICLR 2022 main conference. …
Full post...Yarin Gal, Tuan Nguyen, Andrew Jesson, Pascal Notin, Atılım Güneş Baydin, Clare Lyle, Milad Alizadeh, Joost van Amersfoort, Sebastian Farquhar, Muhammed Razzak, Freddie Kalaitzis, 01 Feb 2022
13 OATML Conference papers at NeurIPS 2021
OATML group members and collaborators are proud to present 13 papers at NeurIPS 2021 main conference. …
Full post...Jannik Kossen, Neil Band, Aidan Gomez, Clare Lyle, Tim G. J. Rudner, Yarin Gal, Binxin (Robin) Ru, Clare Lyle, Lisa Schut, Atılım Güneş Baydin, Tim G. J. Rudner, Andrew Jesson, Panagiotis Tigas, Joost van Amersfoort, Andreas Kirsch, Pascal Notin, Angelos Filos, 11 Oct 2021

Introducing the Shifts Challenge
We have released the Shifts benchmark for robustness and uncertainty quantification, along with our accompanying NeurIPS 2021 Challenge! We believe that Shifts, which includes the largest vehicle motion prediction dataset to date, will become the standard large-scale evaluation suite for uncertainty and robustness in machine learning. …
Full post...Neil Band, Andrey Malinin, Panagiotis Tigas, Yarin Gal, 06 Aug 2021
21 OATML Conference and Workshop papers at ICML 2021
OATML group members and collaborators are proud to present 21 papers at ICML 2021, including 7 papers at the main conference and 14 papers at various workshops. Group members will also be giving invited talks and participate in panel discussions at the workshops. …
Full post...Angelos Filos, Clare Lyle, Jannik Kossen, Sebastian Farquhar, Tom Rainforth, Andrew Jesson, Sören Mindermann, Tim G. J. Rudner, Oscar Key, Binxin (Robin) Ru, Pascal Notin, Panagiotis Tigas, Andreas Kirsch, Jishnu Mukhoti, Joost van Amersfoort, Lisa Schut, Muhammed Razzak, Aidan Gomez, Jan Brauner, Yarin Gal, 17 Jul 2021
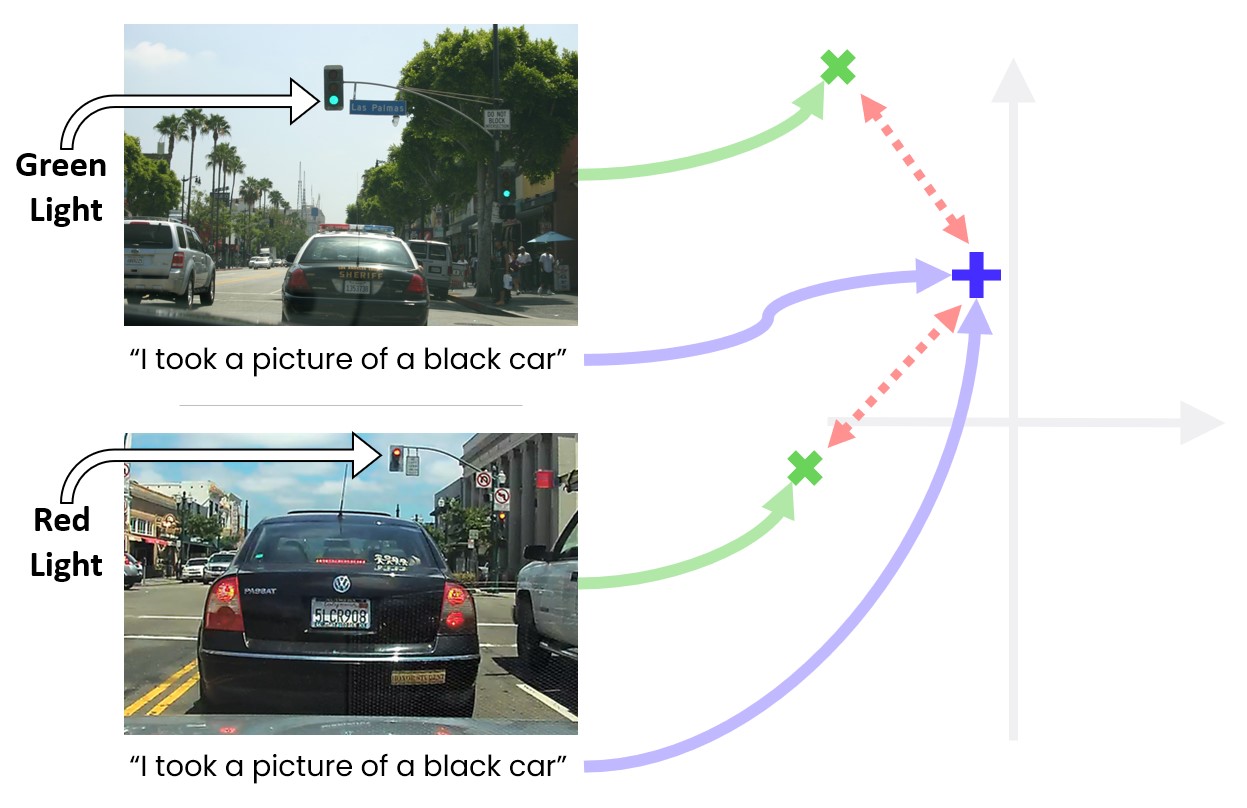
Why I Wouldn't Trust OpenAI's CLIP to Drive My Car
Massive models pre-trained on web-scraped data might be harmful to your downstream application, since their robustness is tightly tied to the way their data was curated. …
Full post...Yarin Gal, 27 Jun 2021
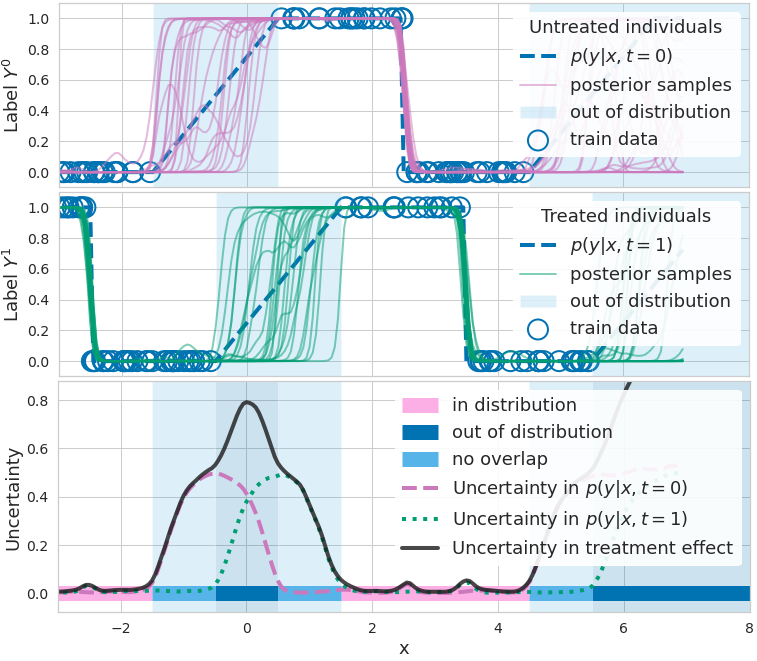
When causal inference fails - detecting violated assumptions with uncertainty-aware models
NeurIPS 2020. Tl;dr: Uncertainty-aware deep models can identify when some causal-effect inference assumptions are violated. …
Full post...Andrew Jesson, Sören Mindermann, Uri Shalit, Yarin Gal, 08 Dec 2020
22 OATML Conference and Workshop papers at NeurIPS 2020
OATML group members and collaborators are proud to be presenting 22 papers at NeurIPS 2020. Group members are also co-organising various events around NeurIPS, including workshops, the NeurIPS Meet-Up on Bayesian Deep Learning and socials. …
Full post...Muhammed Razzak, Panagiotis Tigas, Angelos Filos, Atılım Güneş Baydin, Andrew Jesson, Andreas Kirsch, Clare Lyle, Freddie Kalaitzis, Jan Brauner, Jishnu Mukhoti, Lewis Smith, Lisa Schut, Mizu Nishikawa-Toomey, Oscar Key, Binxin (Robin) Ru, Sebastian Farquhar, Sören Mindermann, Tim G. J. Rudner, Yarin Gal, 04 Dec 2020
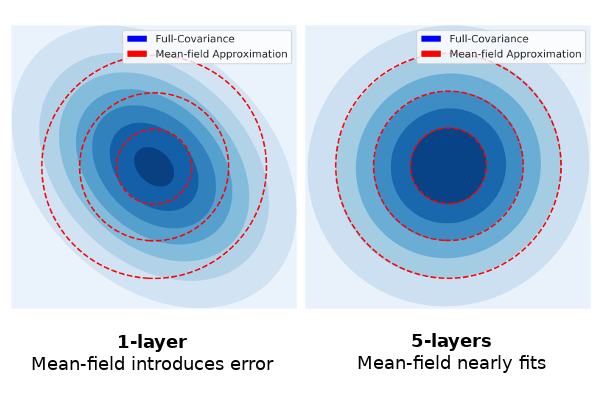
Is Mean-field Good Enough for Variational Inference in Bayesian Neural Networks?
NeurIPS 2020. Tl,dr; the bigger your model, the easier it is to be approximately Bayesian. When doing Variational Inference with large Bayesian Neural Networks, we feel practically forced to use the mean-field approximation. But ‘common knowledge’ tells us this is a bad approximation, leading to many expensive structured covariance methods. This work challenges ‘common knowledge’ regarding large neural networks, where the complexity of the network structure allows simple variational approximations to be effective. …
Full post...Sebastian Farquhar, Lewis Smith, Yarin Gal, 29 Nov 2020
13 OATML Conference and Workshop papers at ICML 2020
We are glad to share the following 13 papers by OATML authors and collaborators to be presented at this ICML conference and workshops …
Full post...Angelos Filos, Sebastian Farquhar, Tim G. J. Rudner, Lewis Smith, Lisa Schut, Tom Rainforth, Panagiotis Tigas, Pascal Notin, Andreas Kirsch, Clare Lyle, Joost van Amersfoort, Jishnu Mukhoti, Yarin Gal, 10 Jul 2020

Can Autonomous Vehicles Identify, Recover From, and Adapt to Distribution Shifts?
In autonomous driving, we generally train models on diverse data to maximize the coverage of possible situations the vehicle may encounter at deployment. Global data coverage would be ideal, but impossible to collect, necessitating methods that can generalize safely to new scenarios. As human drivers, we do not need to re-learn how to drive in every city, even though every city is unique. Hence, we’d like a system trained in Pittsburgh and Los Angeles to also be safe when deployed in New York, where the landscape and behaviours of the drivers is different. …
Full post...Angelos Filos, Panagiotis Tigas, Rowan McAllister, Nicholas Rhinehart, Sergey Levine, Yarin Gal, 09 Jul 2020
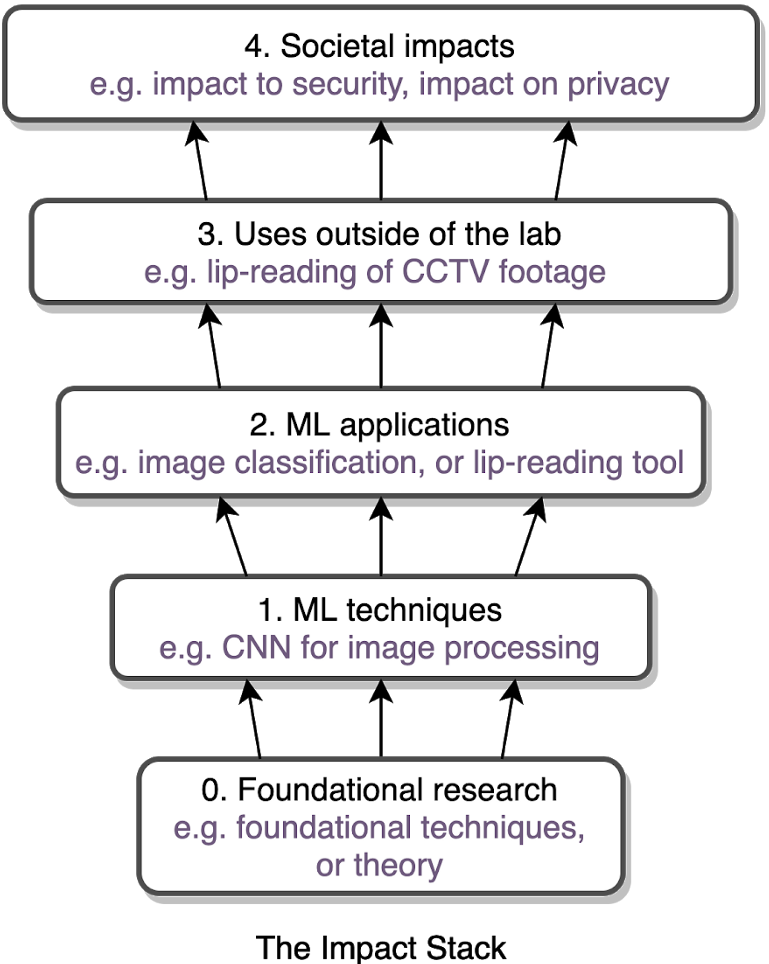
A Guide to Writing the NeurIPS Impact Statement
From improved disease screening to authoritarian surveillance, ML advances will have positive and negative social impacts. Policymakers are struggling to understand these advances, to build policies that amplify the benefits and mitigate the risks. ML researchers need to be part of this conversation: to help anticipate novel ML applications, assess the social implications, and promote initiatives to steer research and society in beneficial directions.
Innovating in this respect, NeurIPS has introduced a requirement that all paper submissions include a statement of the “potential broader impact of their work, including its ethical aspects and future societal consequences.” This is an exciting innovation in scientifically informed governance of technology (Hecht et al 2018 & Hecht 2020). It is also an opportunity for authors to think about and better explain the motivation and context for their research to other scientists.
Over time, the exercise of assessing impact could enhance the ML community’s expertise in technology governance, and otherwise help build bridges to other researchers and policymakers. Doing this well, however, will be a challenge. To help maximize the chances of success, we — a team of AI governance, AI ethics, and machine learning (ML) researchers — have compiled some suggestions and an (unofficial) guide for how to do this. …
Full post...Carolyn Ashurst, Markus Anderljung, Carina Prunkl, Jan Leike, Yarin Gal, Toby Shevlane, Allan Dafoe, 13 May 2020
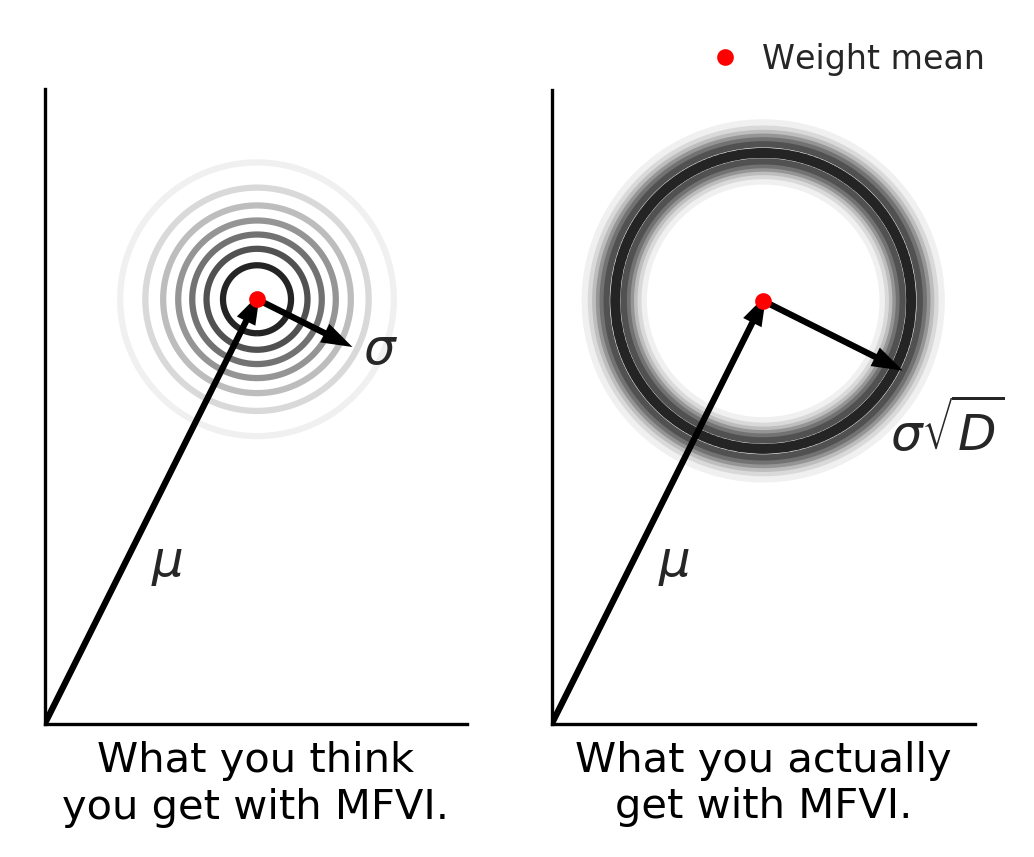
Beyond Discrete Support in Large-scale Bayesian Deep Learning
Most of the scalable methods for Bayesian deep learning give approximate posteriors with ‘discrete support’, which is unsuitable for Bayesian updating. Mean-field variational inference could work, but we show that it fails in high dimensions because of the ‘soap-bubble’ pathology of multivariate Gaussians. We introduce a novel approximating posterior, Radial BNNs, that give you the distribution you intuitively imagine when you think about multi-variate Gaussians in high dimensions. Repo at https://github.com/SebFar/radial_bnn …
Full post...Sebastian Farquhar, Michael Osborne, Yarin Gal, 22 Apr 2020
25 OATML Conference and Workshop papers at NeurIPS 2019
We are glad to share the following 25 papers by OATML authors and collaborators to be presented at this NeurIPS conference and workshops. …
Full post...Angelos Filos, Sebastian Farquhar, Aidan Gomez, Tim G. J. Rudner, Zac Kenton, Lewis Smith, Milad Alizadeh, Tom Rainforth, Panagiotis Tigas, Andreas Kirsch, Clare Lyle, Joost van Amersfoort, Yarin Gal, 08 Dec 2019
Poor generalization can be dangerous in RL!
We want to develop reinforcement learning (RL) agents that can be trusted to act in high-stakes situations in the real world. That means we need to generalize about common dangers that we might have experienced before, but in an unseen setting. For example, we know it is dangerous to touch a hot oven, even if it’s in a room we haven’t been in before. …
Full post...Zac Kenton, Angelos Filos, Yarin Gal, 02 Jul 2019
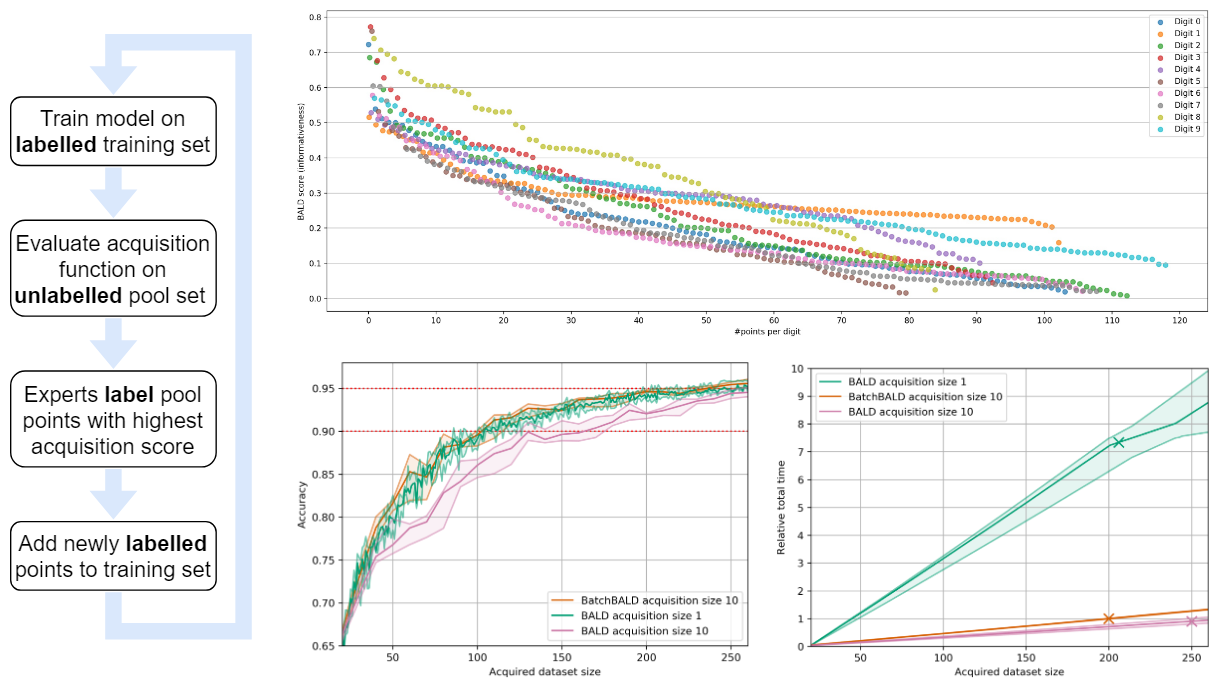
Human in the Loop: Deep Learning without Wasteful Labelling
In Active Learning we use a “human in the loop” approach to data labelling, reducing the amount of data that needs to be labelled drastically, and making machine learning applicable when labelling costs would be too high otherwise. In our paper [1] we present BatchBALD: a new practical method for choosing batches of informative points in Deep Active Learning which avoids labelling redundancies that plague existing methods. Our approach is based on information theory and expands on useful intuitions. We have also made our implementation available on GitHub at https://github.com/BlackHC/BatchBALD. …
Full post...Andreas Kirsch, Joost van Amersfoort, Yarin Gal, 24 Jun 2019
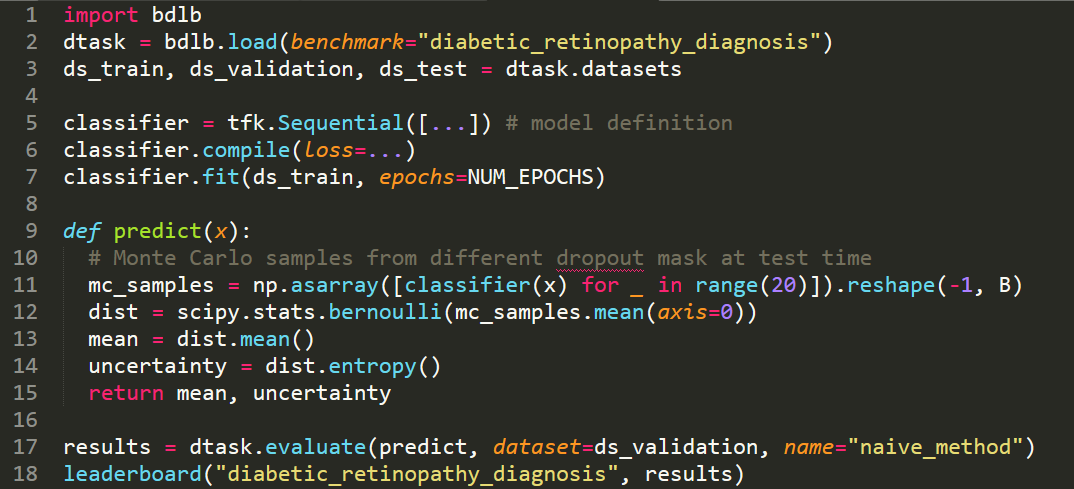
Bayesian Deep Learning Benchmarks
In order to make real-world difference with Bayesian Deep Learning (BDL) tools, the tools must scale to real-world settings. And for that we, the research community, must be able to evaluate our inference tools (and iterate quickly) with real-world benchmark tasks. We should be able to do this without necessarily worrying about application-specific domain knowledge, like the expertise often required in medical applications for example. We require benchmarks to test for inference robustness, performance, and accuracy, in addition to cost and effort of development. These benchmarks should be at a variety of scales, ranging from toy MNIST-scale benchmarks for fast development cycles, to large data benchmarks which are truthful to real-world applications, capturing their constraints. …
Full post...Angelos Filos, Sebastian Farquhar, Aidan Gomez, Tim G. J. Rudner, Zac Kenton, Lewis Smith, Milad Alizadeh, Yarin Gal, 14 Jun 2019